250mm Multirotor Arm
thingiverse
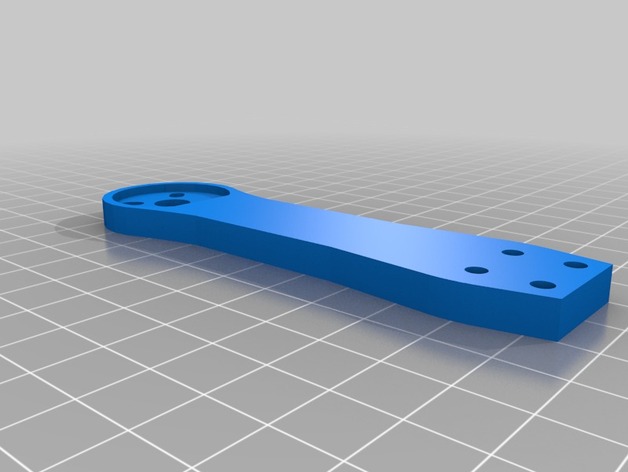
This multirotor arm was designed as a replacement for a ZMR-250 and it's variants. This is version 6 of the design. When printed as described in the Print Settings section, I found that the durability of version 6 is much improved over previous versions. This mount was designed for motors that use 3mm screws. M3x6 screws (3mm diameter by 6mm long) should work for most motors, but that recommendation is based on the motors that I've mounted to the arm. If you are planning on using this multirtor arm, please make sure you don't use a screw that is too long or your motors could be ruined. Print Settings Printer: MTW MiniMax Rafts: No Supports: No Resolution: .40mm Infill: 20% Notes: PETG Settings Extruder Temp: 235 C Heated Bed Temp: 60 C Print Speed: 30mm/s for infill, slower for the borders Nozzle Diameter: .4mm Extrusion Multiplier: .97 Layer Settings Perimiter Shells: 3 Top Layers: 3 Bottom Layers: 3 Layer Height: .4mm First Layer Height: 100% First Layer Width: 100% First Layer Speed: 70% Infill Settings Internal Fill Pattern: Wiggle at 90 degrees (wiggle goes the length of the arm) External Fill Pattern: Rectilinear Infill: 20% Outline Overlap: 25% Infill Extrusion Width: 100%
With this file you will be able to print 250mm Multirotor Arm with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on 250mm Multirotor Arm.