8 Servo Walking Quadruped
thingiverse
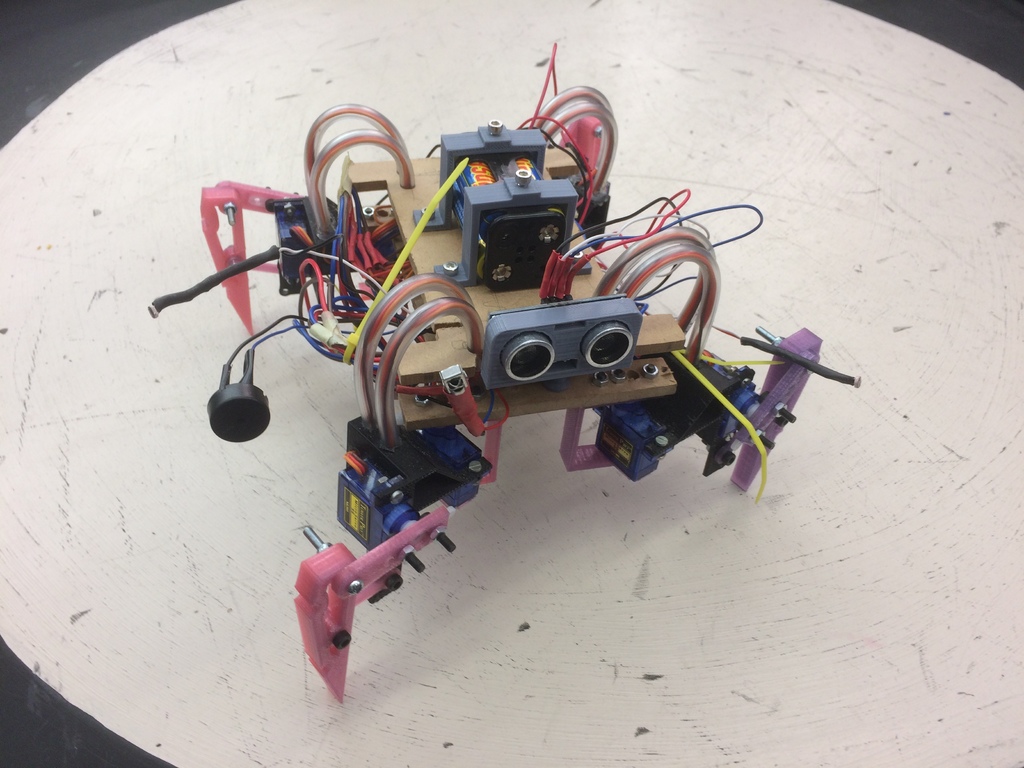
STL Files for My 8-Servo Walking Quadruped. This Was My Year 13 Technology Project at St Patrick's College, Designed For Educational Use, Recreational Fun, and Further Development. Specifications: Electronic Components: • 3x AA Batteries in Series Configuration Provide 4.5V to the PICAXE Chip. • 4x AA Batteries in Series Configuration Provide 6V to the 8 Servos. • 8x SG90 Micro Servos for Smooth Movement. • 1x Circuit Board for Electronics Management. • 1x 20M/M2/X2 PICAXE Microcontroller for Control and Processing. • 3x Light Dependent Resistors for Sensing Environment. • 2x Infrared Light Emitting Diodes for Object Detection. • 1x Switch for Power On/Off Control. • 2x Light Emitting Diodes for Visual Indication. Body Parts: • 4x Leg Brackets for Structural Support. • 4x Servo Arm Adapters for Smooth Servo Movement. • 4x Lower Leg Support Arms for Stability and Balance. • 4x Servo Supports for Body Connection and Movement. Functions: • Walk in a Straight Line Forwards and Backwards with Ease. • Turn Left and Right with Precision Control. • React to Environment by Detecting Walls and Turning Towards Them. • Respond Differently to Other Robots Depending on Their Status. Materials: • Circuit Components for Electronics and Control. • M3 Screws and Nuts for Assembly and Fastening. • Nylock Nuts for Secure Fastening. • PLA Plastic for 3D Printed Parts. • 5mm MDF Wood for Structural Support. • 3mm Plastic Tubing for Hoses and Cables. Send Fusion 360 Files on Request.
With this file you will be able to print 8 Servo Walking Quadruped with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on 8 Servo Walking Quadruped.