ADAPTIVE GRIPPER-ROBOTIC HAND WITH THREE FINGERS
pinshape
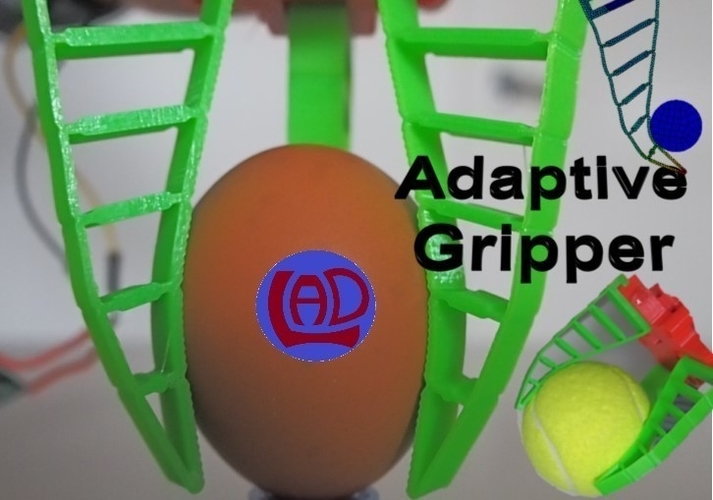
This is an adaptive gripper with three flexible fingers. It’s inspired by the Fin Ray Effect, which has been used by many so far. This is my own vision of that concept and it is free to download if you wish to print one for you hobbies and/or university or school assignments. Assembly instructions are found on video: What you need 3 pcs of "Clamp.stl" 3 pcs of "Corrugated_adaptive_Finger.STL" 1pc of "Front_base.STL" 1 pc of "Motor_Support.STL" 1pc of "Worm_Follower.STL" 1pc of "Worm_gear.STL" then the hardware shown on the video. Happy printing!!! 3D PRINTING SETTINGS NONE OF THE PARTS NEED SUPPORT. MUST TURN OFF SUPPORTS ON YOUR SLICER. I have included a thin layer of 0.3mm in the holes of "Motor_Support.STL" to avoid using supports. This thin layer needs to be remove with a 3mm drill bit or similar, so that the holes go through. All parts are printed in hard material with the exception of the Green finger or "Corrugated_adaptive_Finger.STL" which is of flexible material ( TPU 92 shore A). I have printed this one on my Ender 3, which has a Bowden tube. Printing Settings of TPU flexible material: *Print *speed of 20mm/sec. *Retractions need to be turned OFF. *In CURA, under TRAVEL", set the "COMBINE MODE" to ALL, which will make the nozzle to travel inside the printed part only. Failure to do so will result in bits going through the print where they are not supposed to be, which you'll have to cut later with scissors, and is a real pain because the material is flexible.
With this file you will be able to print ADAPTIVE GRIPPER-ROBOTIC HAND WITH THREE FINGERS with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on ADAPTIVE GRIPPER-ROBOTIC HAND WITH THREE FINGERS.