Articulated Wedge Battlebot Ant Weight Robot
thingiverse
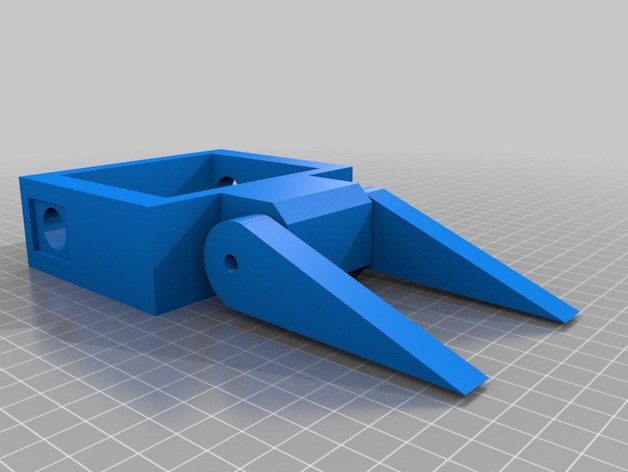
This is a work in progress and subject to revisions. This is an articulated wedge that will operate even when flipped over. It works by going under it's opponent until one of the screws in the wedge catches which forces it to fold in half with the wheels which are all the way to the back causes it to stand on end flipping its opponent. I designed this to use the Fingertech Silver Spark or Gold Spark motors with the bearing block mounts. The bearing blocks will fit into the recess on the sides to help with alignment. I recommend using the 2.25" Fingertech snap hubs and wheels. I will be competing at the DARC Robot Rebellion in Richardson, Texas on 3/12/17 with this robot and will upload videos afterwards. Using 50% infill with 5 layers top and bottom and 6 on the sides this robot has plenty of weight to spare for a 1/16" Lexan top and bottom covers along with a 3S 450mah lipo and 6 channel receiver. Edit: 2-19-17 I noticed some issues while printing which included the wedge mount being off-center so I have corrected this and uploaded a new file which also was made a bit bigger to give a bit more space between the Fingertech motors. Edit 2-20-17 I made the recess for the bearing blocks 1mm wider and taller to allow for an easier fit. The bearing block should fit nicely into the recess now where it was a very tight fit before. I have added 2 more files which include a main body that can print without supports, and some wedges without the text on them. Here are some links to the parts needed from Fingertech- Silverspark motors http://www.fingertechrobotics.com/proddetail.php?prod=ft-Sspark16 Bearing Blocks http://www.fingertechrobotics.com/proddetail.php?prod=ft-bearing-block Wheels & Hubs http://www.fingertechrobotics.com/proddetail.php?prod=snap-wheels-hub I use modified VEX 29 motor controllers and a FlySky 6 channel radio set, but you can buy some Tiny ESC's or pick up a set of small brushed motor controllers off of eBay. Edit 3/1/2017 - I have added some longer wedges which have stops on them to keep your opponent from sliding all the way on top of the robot, and this also forces the folding under action that tips the other robot over. I used a 10-24 X 3" screw to secure the wedges to the body. You can see by the attached pictures that I used a screw to keep the front of the main body up a little more than level to aid in the tipping motion as well. Here is a video of the robot being driven on the floor. https://youtu.be/--WZDBqPA64 Print Settings Printer: Home Built Core-XY Rafts: No Supports: Yes Infill: 50% Notes: I print PLA on my printer at 230C. with the bed at 65C.
With this file you will be able to print Articulated Wedge Battlebot Ant Weight Robot with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Articulated Wedge Battlebot Ant Weight Robot.