Basic Robot Arm
myminifactory
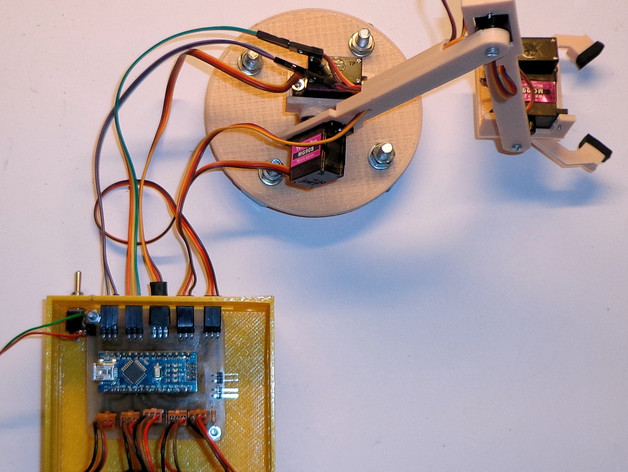
Robot Arm for Beginners Robot arm designs often rely on mini servo motors like the MG90S (MG = Metal Gear). However, the power of these small devices is frequently overestimated. Traditional robot arm designs are quite complex and have numerous friction points due to their link structure. This link structure exists solely to keep the clamp horizontal. By adding another servo, we gain more freedom and can eliminate the link structure entirely. The simple arm structure is directly attached to the servos without the need for horns that come with the servo motors. Instead, we will utilize the screws provided. The wires run through the cylinders on the arms to tidy up the setup a bit. The servos are controlled by an Arduino Nano board. Make sure to supply the 5-volt power from an external source. On the PCB, there is also a connection for 7 to 12 volts, but only for test purposes without servo motors attached. You don't want to damage the Arduino 5-volt regulator, which has limited capacity. In this test setup, five potentiometers are used to control the position of the servos. If you want to run the robot arm autonomously, you can use the switch in the code: if (val > 500) { analogRead(switch); potentiometer program } else { your program part } Check out the movie on YouTube; the arm is manually controlled. The code for manual control is attached.
With this file you will be able to print Basic Robot Arm with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Basic Robot Arm.