Bottom and landing gear for Robocat 270
thingiverse
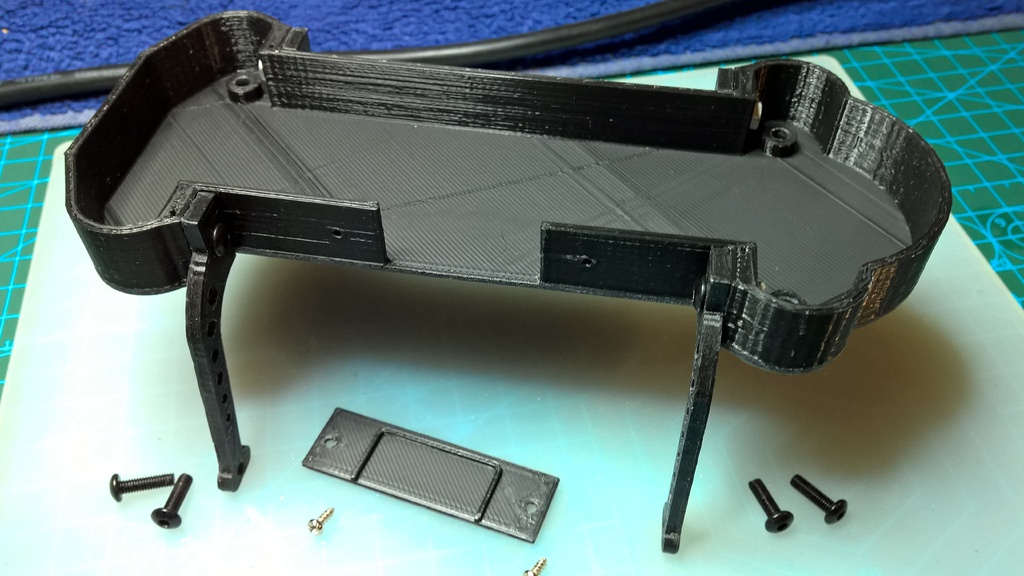
I decided to assemble the frame Robocat 270 not as intended. I used the flight controller Omnibus F4 v3 pro (without current sensor) and PDB/ESC board BS430. But the simultaneous installation of these boards on the frame Robocat 270 is not provided. I installed the PDB board in the designated place and the flight controller I installed on the back side at the bottom (see photo). To protect the flight controller I made a model of bottom case. At the same time I decided to fix the landing gears on it. To fix the bottom case, you must move the four threaded pillars to the opposite side. This kind of assembly at the same time facilitates the dismantling of the frame for access to the boards separately. Through the holes at the bottom of the landing gear it is possible to pass carbon tubes with OD 3 mm. Together with the flight controller I also plan to place a compass board and RC receiver Radiolink R12DSM. Project files for SketchUp Pro 2018 is attached. Used together with motor protection from here: https://www.thingiverse.com/thing:2655174 and wire protection from here: https://www.thingiverse.com/thing:2656924 Where I bought: Robocat 270: https://goo.gl/wToqyZ Omnibus F4 v3 pro: https://goo.gl/nom1k3 BS430 PDB/ESC: https://goo.gl/td4erZ R12DSM: https://goo.gl/e181a3 PS. Sorry for my English :)
With this file you will be able to print Bottom and landing gear for Robocat 270 with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Bottom and landing gear for Robocat 270.