Coaxial shaft
thingiverse
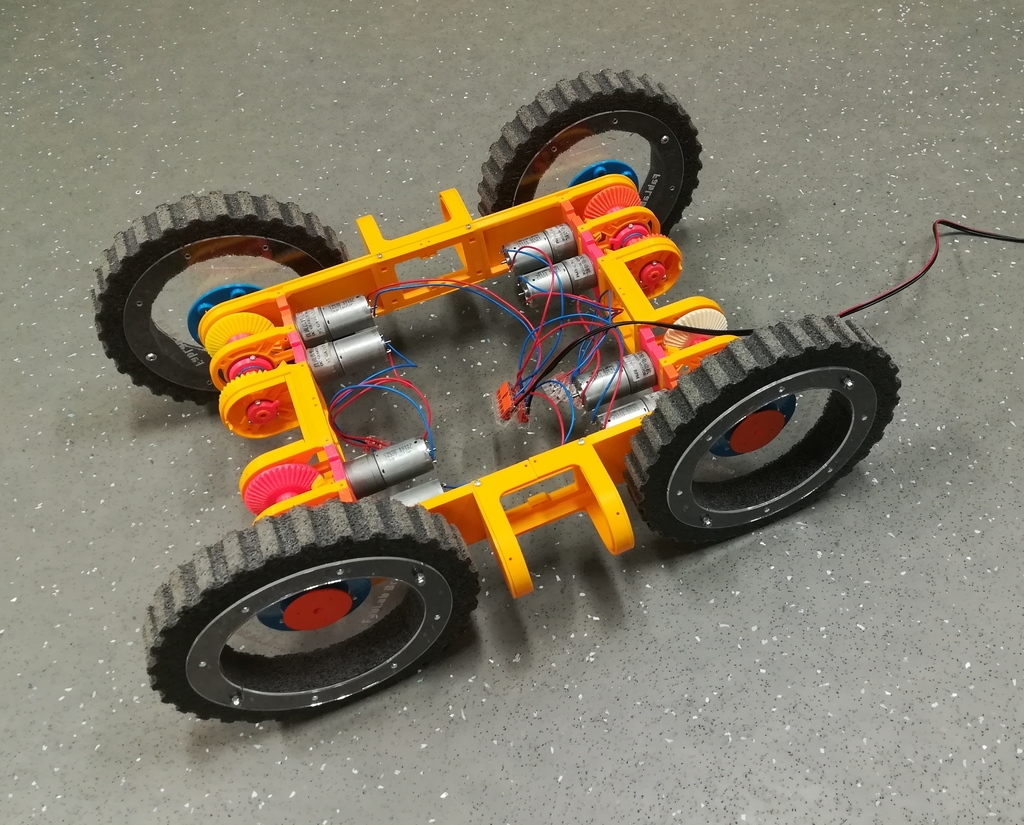
Coaxial shaft assembly is not independent model it is part of future robot design but is stored independently on Thingiverse. Purpose of this design is to integrate two coaxial independently powered shafts in one mechanism. For example: One drive wheel second drive fliper. This is first prototype. ###BOM COTS: JGA25-371 - 25 mm diameter motor with gearbox and encoder 10x15x4 6700 bearing 20x27x4 6704 bearing key printed parts M1 16z 30deg bevel gear M1 40z 60deg bevel gear ### STL export resolution: **1 um** Resolution setup in FreeCAD: 1. Switch to Mesh Design bench 2. Go to Edit > Preferences > Import-Export > Mesh Formats 3. Set Maximum mesh deviation 1 um ### Slicer setup Slicer: Slic3rPE-1.41.0+win64-full-201809010758 Print settings: 0.15mm OPTIMAL MK3 Filament: Prusa PLA Printer: Original Prusa i3 MK3 Changes from default settings: - Print Settings - Layers and perimeters - Seam position: Random - Infill - Fill density: Shafts & Rings 40% Gears 20 % - Fill pattern: Honeycomb ### g-codes g-codes generated for MK3 and MK2.5 Shafts printed independently All sleeves and rings for both shafts Gears for both shafts
With this file you will be able to print Coaxial shaft with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Coaxial shaft.