CoreXY Laser Engraver Mk2
prusaprinters
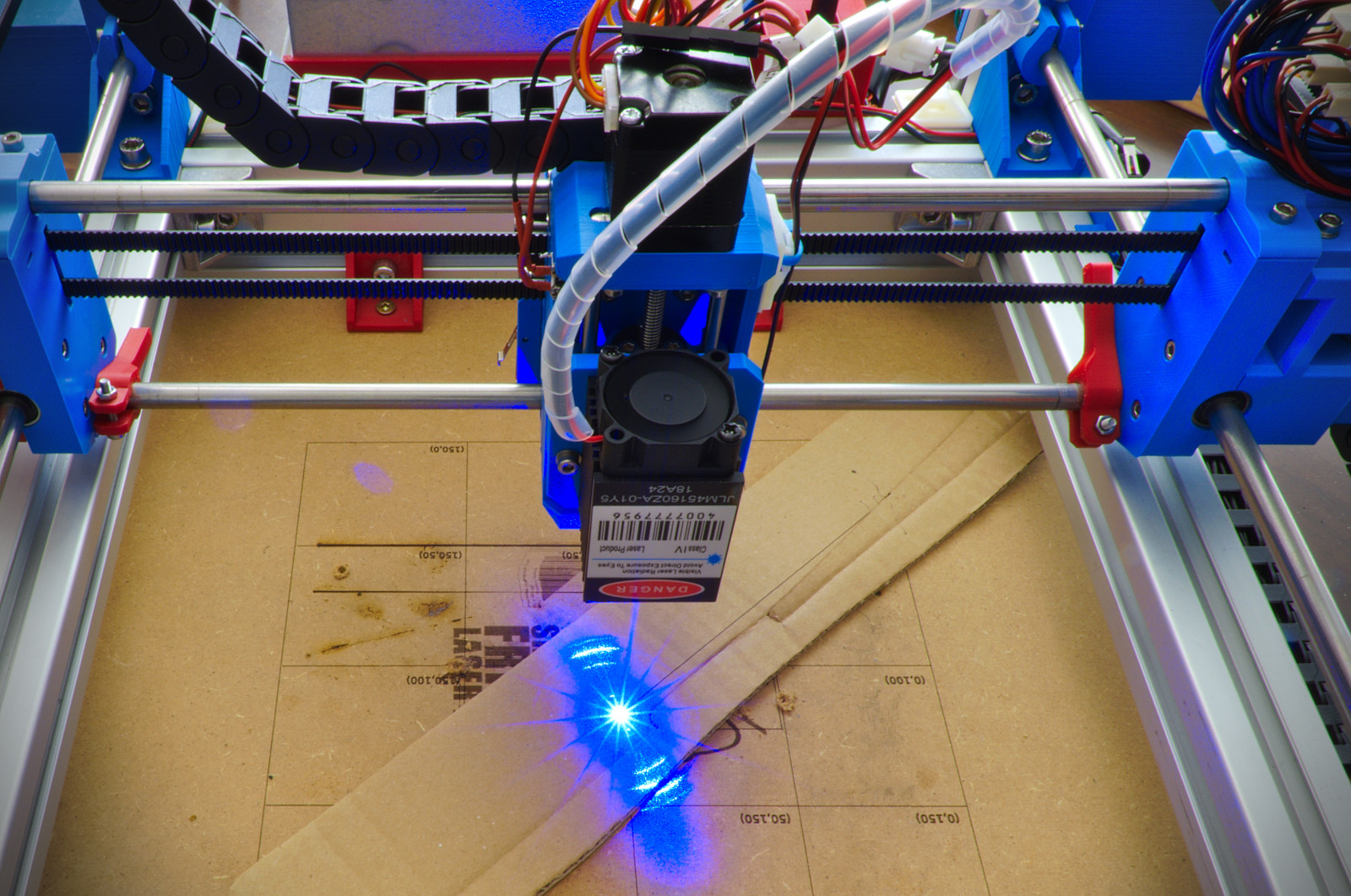
<p>I've been working on an upgrade for the original engraver. When Jogi on Thingiverse posted his Make of the original version (<a href="/make:523254">https://www.thingiverse.com/make:523254</a>) he improved on many shortcomings (much cleaner build, larger area, chain belts) and we began discussing about a Z axis implementation. It took quite a while but here's now the Mark 2 engraver with a motorized Z axis iwht 50 mm effective travel range.</p> <p>The Z axis can for example be used to find the optimal laser focus by scanning a certain height range. You can also adjust your focal spot on a sacrifical layer on your work piece and later correct for its height by using the Z axis.<br/> And, of course, you can engrave 3D surfaces. although this probably requires a proper CAM software.</p> <p>I will add more details in the future and generally report on the new design.</p> <h3>Print instructions</h3><p>All parts are shown in the orientation I printed them. The only parts requiring supports are the ATX power supply mount and the Z carriage (IIRC).</p> <h3>List of changes</h3><h4>Z-axis</h4><p>A Nema11 stepper with an integrated 5 mm / 2 mm pitch trapezoidal screw drives the z axis. The motion stage is guided by 4 mm rods and brass bushings.<br/> The additional parts reduce the Y-axis-range about 30 mm while the usable X-range is unchanged.</p> <p>This is the stepper I use: <a href="https://www.omc-stepperonline.com/de/nema-11-external-34mm-stapel-0-75a-fuhren-2mm-0-07874-lange-100mm.html?search=11LS13-0754E-100B">https://www.omc-stepperonline.com/de/nema-11-external-34mm-stapel-0-75a-fuhren-2mm-0-07874-lange-100mm.html?search=11LS13-0754E-100B</a></p> <h4>Chain belts</h4><p>All cables are routed through 10x10 mm chain belts. On top of the Y carriage is a mounting plate for the laser driver, as well as a connector board for easier disassembly. Note to self: next time don't use closed chain belts. And buy multi-wire cables...</p> <h4>Electronics</h4><p>The electronics has been replaced with an Arduino Uno + CNC Shield. For one thing it's smaller and, more importantly, allows to use the endstops as hardware limits. Not more accidental crashing into the frame.</p> <p>I also added 3 buttons to the control box which are wired to the "feed hold", "start/resume" and "abort/reset" pins. Hold and resume is a pretty neat feature of GRBL...</p> <p>The spindle enable pin is now equipped with a pull-down resistor to prevent the laser from turning on during GRBL boot. Its value doesn't really matter, just use 1k or higher.</p> <p>Here's a pre-configured GRBL version for you to use:<br/> <a href="https://github.com/RealNagus/grbl-CoreXYLaserEngraver-Mk2">https://github.com/RealNagus/grbl-CoreXYLaserEngraver-Mk2</a></p> <p><strong>IMPORTANT NOTE:</strong> The CNC shield was designed for an older GRBL version. Newer versions have a different pin layout when using a variable spindle, i.e. PWM to control the speed/laser power like we do. The spindle enable and Z axis limit pins must be switched! Refer to the schematic in the pictures.</p> <h4>X carriage</h4><p>On the original build the laser driver was fastened with regular M3 hex nuts you placed into the X carriage. I found this quite frustrating at time since they move around and potentially twist. In the Mk2 version they are replaced by M3 thread inserts that you melt into the plastic.</p> <p>The X rod mounts are split into two. On my first machine there have been some motion issues due to small misalignment of the X axis. With the two-part-design you can add small shims to adjust the X-rod spacing for smoother movement. Of course, now that I have the ability to fine-tune, the assembly is moving smoothly without any modification...</p> <h3>Parts List</h3><h4>Electronics</h4><ul> <li>1x Arduino Uno</li> <li>1x Arduino CNC Shield</li> <li>3x Stepper driver (A4498, DRV8825, SilentStepStick)</li> <li>4x Endstops (Makerbot)</li> <li>2x Microswitches (13 mm length)</li> <li>3x 12 mm round push buttons</li> <li>1x stripboard, approx. 66x15 mm </li> <li>1x Laser with TTL driver (+fan if not integrated)</li> <li>1x 12V Power supply (e.g. old ATX)</li> <li>1x Fan 12V (for the electronics case)</li> <li>2x Nema 17 stepper motor</li> <li>1x Nema 11 stepper with 100 mm integrated trapezoidal screw (see link above)</li> </ul> <h4>Mechanics</h4><ul> <li>2x 8 mm Rods, 370 mm (Y axis)</li> <li>2x 8 mm Rods, 330 mm (X axis)</li> <li>2x 4 mm Rods, 100 mm (Z axis)</li> <li>8x LM8UU linear bearing</li> <li>4x brass bushing, 4x6x8 mm</li> <li>16x Ball bearing 625 ZZ</li> <li>6x 5mm steel rod, 40 mm (for fastening the ball bearings)</li> <li>2x GT2 Pulley, 16 teeth</li> <li>ca. 4m GT2 belt</li> <li>2x Aluminum profile, 30x30 B (8 mm slot), 325 mm</li> <li>4x Aluminum profile, 30x30 B (8 mm slot), 150 mm</li> <li>2x Aluminum profile, 30x60 B (8 mm slot), 360 mm</li> <li>12x Corner mounting brackets 30x30</li> <li>10x10 mm chain belts</li> </ul> <h4>Screws</h4><ul> <li>M6 T-slot nuts</li> <li>M6 screws</li> <li>M3x16 head cap screw</li> <li>M3x20 head cap screw</li> <li>M3x25 head cap screw</li> <li>M3 square nuts</li> <li>M3 hex nuts</li> <li>4x M3 thread inserts </li> <li>M2x10 mm screws (for the Z end stop switches)</li> <li>Thermoplastic screws, 2.5 mm & 3 mm (endstops, Arduino mounting, etc.)</li> </ul> <h3>Instructions</h3><h4>3D printed parts</h4><p>Before you begin here's a list of how many pieces you need to print of each part:</p> <h5>Print these 4 times</h5><ul> <li>Y_axis_mount.STL </li> <li>belt_pusher.STL </li> <li>base_mount_angle.STL (optional)</li> </ul> <h5>Print these 2 times</h5><ul> <li>belt_diverter.STL </li> <li>belt_clamp.STL </li> <li>X_endstop_trigger_clamp.STL </li> <li>Y_carriage-front-Part_A.STL </li> <li>Y_carriage-front-Part_B.STL </li> <li>Y_endstop_mount.STL</li> </ul> <h5>Print these 1 time</h5><ul> <li>Arduino_Uno_CNCCase-Part_A.STL </li> <li>Arduino_Uno_CNCCase-Part_B.STL </li> <li>ATX_power_supply_mount.STL </li> <li>cable_chain_mount_X.STL </li> <li>cable_chain_mountY-_A.STL </li> <li>cable_chain_mountY-_B.STL </li> <li>laser_mounting_plate.STL </li> <li>Nema17_mount.STL </li> <li>Nema17mount-_left.STL </li> <li>Xcarriage-_back.STL </li> <li>Xcarriage-_front.STL </li> <li>X_endstop_mount.STL </li> <li>X_endstopmount-_left.STL </li> <li>Ycarriage-_back.STL </li> <li>Ycarriage-_back_left.STL </li> <li>Z_axis_cage.STL </li> <li>Z_carriage.STL</li> </ul> <h4>Assembly order</h4><p>The rough order of assembly is as follows, the details are left as an excercise to the reader... ;-)</p> <ol> <li>Assemble the aluminum frame</li> <li>Add the ball bearings to the parts that need them</li> <li>Put M3 nuts in place where needed</li> <li>Put the two Y rods with Y axis mounts into the frame (don't forget the LM8UUs)</li> <li>Assemble the X rods with the X_carriage_front parts (the bottom screw is tricky to tighten once it's attached to the Y axis)</li> <li>Put the X rods inbetween the Y rods. It should hold by itself when placed onto the LM8UU bearings. Then add the Y carriage back parts</li> <li>Attach the X carriage front and back (mount the end stops and belt clamps first)</li> <li>Insert the Z rods and Z motor into the Z cage. Don't forget the Z carriage, it can't be added later on</li> <li>Add the Z endstops and mount the assembled cage to the X carriage</li> <li>Mount the X/Y motors with GT2 pulleys</li> <li>Run the belt along its path and fasten both on one side of the X carriage</li> <li>Insert the belts on the other side now. Make sure the tensioners are loose. Fasten them after the belt has been properly clamped</li> <li>Mount the Y endstops and X endstop trigger clamps</li> <li>Mount the cable chains and route all the wires</li> <li>Connect the wires to the Arduino CNC shield and/or power supply</li> <li>Install GRBL, test, fix errors, have fun engraving! :-D</li> </ol><h4>First run checklist</h4><p>After the assembly is done the firmware has to be flashed to the Arduino and properly configured. There are a few steps that you should always perform to save you lot's of trouble later on.</p> <ol> <li>Microstepping<br/> The GRBL version I posted on GitHub assumes a specific hardware / electronics configuration. X and Y are assumed to use 32x microstepping, Z 4x microstepping. <br/> Also the belt is assumed to be GT2 (2 mm spacing), the pulleys to have 16 teeth and the Z-screw to have a 2 mm pitch. If your configuration is different you have to tune your GRBL differently.</li> <li>Stepper motor direction<br/> The direction each stepper turns for given signals from the controller is hard to tell without trying it. You can change a motor's rotation direction by flipping its 4-pin connection. <br/> At the beginning you should check if every motor moves as expected. Manually place each carriage in the center of its range and send GRBL jogging commands, e.g. from UGS Platform software. <br/> The machine is configured to have it's origin in the lower left part when looking at it from the electronics end. Ensure that a +X movement command moves the carriage to the right, a +Y movement away from you and a +Z movement downwards. </li> <li>Spatial calibration <br/> Make sure your steps/mm is correct for all axes by measuring them. </li> <li>Hardware limits<br/> Make sure all hardware switches trigger correctly and put GRBL into Alarm mode.</li> </ol>
With this file you will be able to print CoreXY Laser Engraver Mk2 with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on CoreXY Laser Engraver Mk2.