Drone Arm Parametric Design
thingiverse
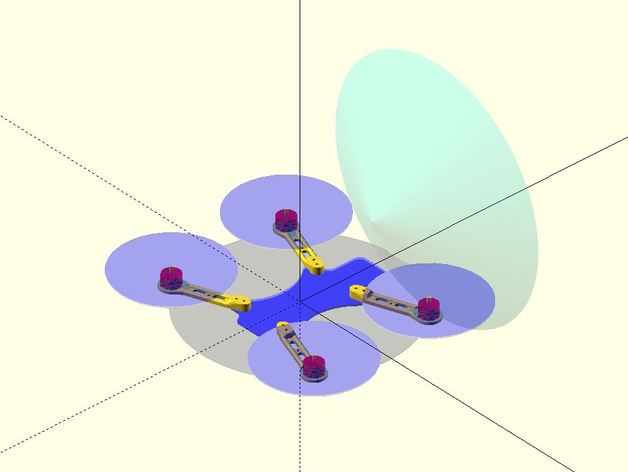
I am new to quadcopter designs & was not sure what size I wanted my quadcopter to be. After researching several designs, I decided to create a parametric Arm design so I could easily adjust some key dimensions of the arm & see how it looked visually put together. This is an original creation, but did draw inspiration from the wire channel idea found in Peon230's design on Thingiverse. The ledges on each side of the arms are 8 sided which has worked well for me in other designs adding strength with less plastic & providing a channel for the wires to lay in as well. There is also an option to make the arms flat if you do not need that channel. There are numerous dimensions you can adjust for this design & I have included a PDF file showing the variables that may not be obvious from the description in the openscad file. You can use this as a visual aid to see how different length arms, locations & rotations affect your design. Once you have it the way you want it, you can set the PartView variable to 0 to display your arm for printing. The arms generated by this design could be used for Tricopters, Hexacopters or Octocopters. Some small changes would need to be made to the code to visually show the other style drones. The frame I am using for the visual on these arms is a modification to the BumbleBee Quadcopter on Thingiverse. As you can see from the screen capture, this will show you whether your props interfere with each other or be in the camera view. If they do interfere, you can just adjust the length of the arms, the size of the props, rotation of the front and/or back arms or the location of where the arms are located on the frame.
With this file you will be able to print Drone Arm Parametric Design with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Drone Arm Parametric Design.