Equivalent Pseudo Rigid Body Mechanisms
pinshape
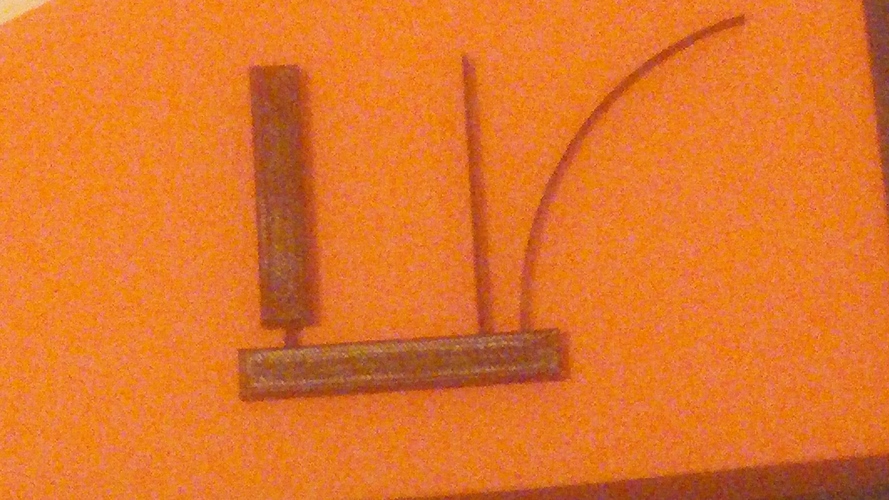
These three prongs are compliant mechanisms - devices that transform a mechanical input into a mechanical output by flexing (bending). They are also pseudo-rigid body mechanisms, meaning their motion is designed by approximating rigid body mechanics. They are engineered to be equivalent because they should have roughly the same spring constant and deflect the same amount per force applied to bend them. If you close your eyes and push down on the end of the beam, it should feel the same. This was printed in PLA with 2 shells, 10% infill, and the print materials and settings affect how stiff the mechanism is. These three pseudo-rigid body mechanisms are different beams that approximate a pin joint (or revolute joint) with a torsional spring. From left to right, they are a short cantilever beam, a fixed-pinned cantilever beam, and an initially curved fixed-pinned cantilever beam. These different pseudo-rigid body models are all derived from an elliptic-integral solid mechanics model of the path of a bending beam, with different assumptions to solve the problem. If you want to know more about it, check out the slides from my Compliant Mechanisms Independent Project's final presentation here: https://docs.google.com/presentation/d/... . For more of my 3D printing posts, visit my Google plus collection where you can click the notification bell to receive further alerts about new posts. https://plus.google.com/collection/...
With this file you will be able to print Equivalent Pseudo Rigid Body Mechanisms with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Equivalent Pseudo Rigid Body Mechanisms.