Falcon Hand V1
thingiverse
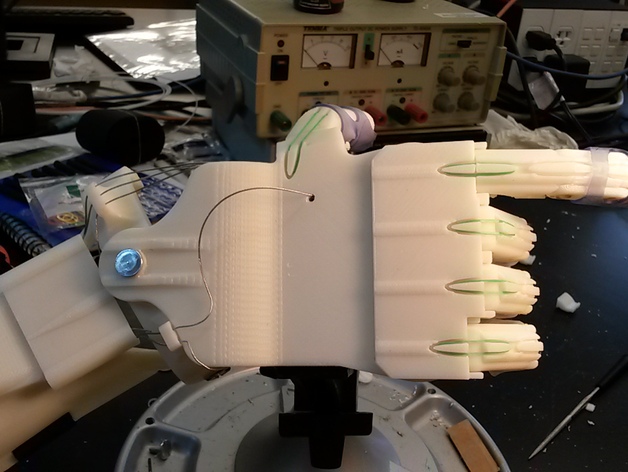
Our first contribution to the E-Nable community, this "Falcon Hand V1" demonstrates a number of design ideas we wanted to prototype. This prosthetic device is intended to grant the user more ability by incorporating selective grasps depending on the user's radial-ulnar deviation. It incorporates a number of simplifications to the printable-prosthetic manufacturing process. The control cables are crimped rather than tied to the fingertips and are tensioned at the gauntlet with a quarter-turn pinching design. Orthodontic rubber bands are used as the spring return, eliminating the need for elastic cable routing. The use of hardware has been minimized, relying on filament hinges and snap-on proximal knuckles. It is important to note that this is simply a design feature showcase and not intended for use on an actual patient. It is under constant revision and work on version 2 is already underway. This hand is the work of Dr. Adam Arabian, Sean Russell, and Barrett Estep. It was designed and developed in cooperation with Seattle Pacific University. www.spu.edu www.enablingthefuture.org Instructions Assembly instructions will be up on Instructables:http://www.instructables.com/id/Falcon-Hand-V1/ Print List: 1x Thumb 1x Tensioner Snap Cover 4x Proximal Phalange 1x Proximal Knuckle Slide Cover 1x Palm 4x Middle Phalange 1x Gauntlet 4x Distal Phalange 5x Control Cable Crimper (I would print a few spares, they are relatively small/fragile) 4x Block (Totally optional, we decided not to use this part in our build) 1x Arch
With this file you will be able to print Falcon Hand V1 with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Falcon Hand V1.