Foot contact switch sensor for Spotmicro quadruped
thingiverse
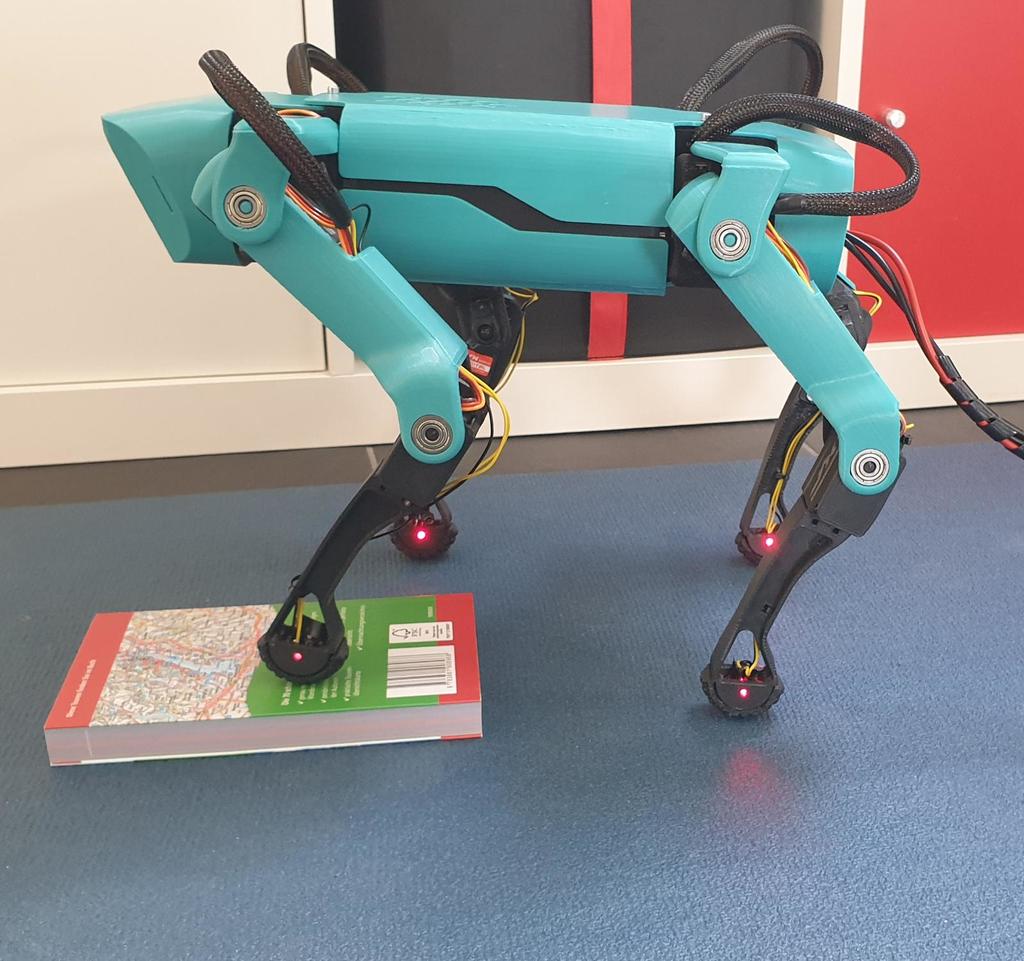
Reliable foot contact switches for KDY0523's Spotmicro robot dog ==================== TLDR: foot contact switch using force-sensitive resistors requiring only two additional printed parts and some electronics [Video](https://github.com/ThomasSchnapka/quaro/blob/next/media/foot_contact_switches_gait.gif) ### Introduction One of the biggest flaws of a quadruped robot on a budget is that the servo motors do not give any feedback. To deal with it I wanted to try out foot contact switches. I tried to design the foot contact switches as easy and cheap as possible while maintaining the usual Spotmicro design. Basically, there are two force-sensitive resistors (FSR) in parallel integrated into a voltage divider. By measuring the voltage over the resistors, we can determine if the foot touches the ground. There is a LED placed in the foot for visual feedback. ### Instructions - In addition to the provided parts, you need the usual Spotmicro foot from [KDY0523](https://www.thingiverse.com/thing:3445283) printed in *flexible* filament. Make it as flexible as possible. - print the remaining parts in PLA with 10% Infill - make sure to remove all support material - solder all parts according to the given scheme - use tape to fix everything in place. The tapes main purpose is to provide a counteracting force in order to push the foot away to relieve the resistors ### Electronic parts - 8 force-sensitive resistors such as RP-S5-ST - 4 or 8 LEDs with 3mm diameter - matching resistors - any microcontroller, I am using an Arduino Nano (take a look at my Github for code) ### Implementation in control software Check my implementation on [https://github.com/ThomasSchnapka/quaro](https://github.com/ThomasSchnapka/quaro). If you manage to put this sensor in your own control software, feel free to share it, I'm curious! One of the biggest flaws of my implementation is the slow I2C communication. Although I've rewritten my Python code into C++, I still can't get below an update rate under 0.01s, which seems to be too slow for fast gaits. ### Troubleshooting If your setup is not working, try the following: - make sure the "spacer" is able to move freely without getting stuck. This might be because of leftover support material - choose an appropriate threshold for your voltage - filter the voltage signal if necessary (you may orientate on my code)
With this file you will be able to print Foot contact switch sensor for Spotmicro quadruped with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Foot contact switch sensor for Spotmicro quadruped.