Ghassaei linkage walker
thingiverse
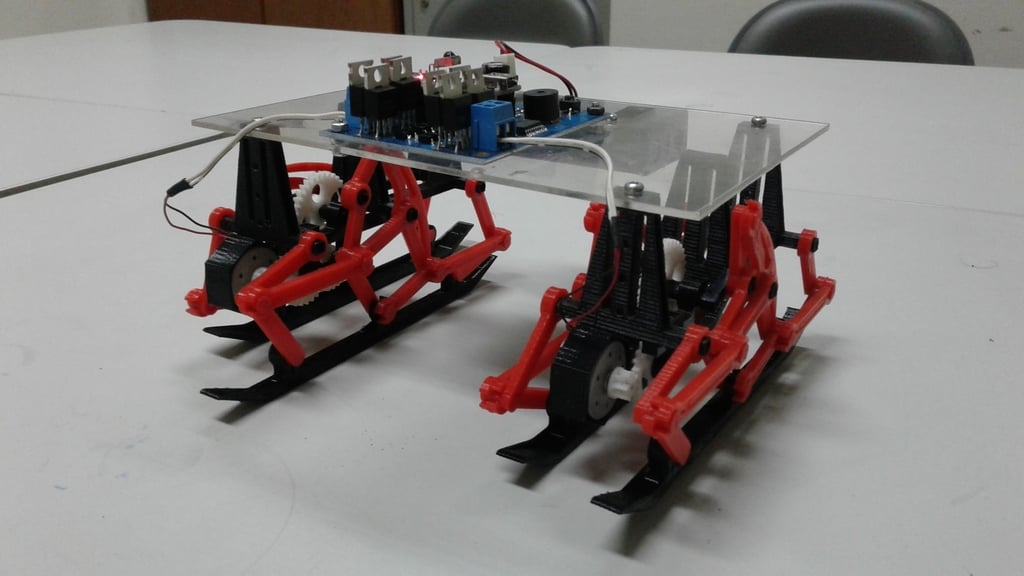
This is an implementation of the Amanda Ghassaei linkage. In this design, parallelogram linkages are used to copy the movement to provide support at more points. To make a steerable vehicle, 2 sets is printed and placed side by side (mirroring not necessary), each set driven separately like a tank. Parts list: linkages: barA x2 barB x2 barC x2 (1 mirrored) barCb x2 barD x2 barDb x2 barE x2 barEb x2 barF x2 barFb x2 foot x2 connector x2 front, back, left, right x1 gear1 x1 gear2 x2 gear3 x1 leftcrank, rightcrank x1 Almost all joints are screw free, only gear axles and top acrylic plate mounting used M3 screws. Because of the tolerance in the design, the feet were not able to lift as high as designed and able to nod up and down, while theoretically the vehicle should run smoothly as if using wheels. A DVD motor is used for the motion source. I used 2x lithium 18650 batteries, Arduino nano, and infrared remote to control the vehicle. Video: https://youtu.be/ANAK5SToOpI
With this file you will be able to print Ghassaei linkage walker with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Ghassaei linkage walker.