Grasp Beta 1.0
thingiverse
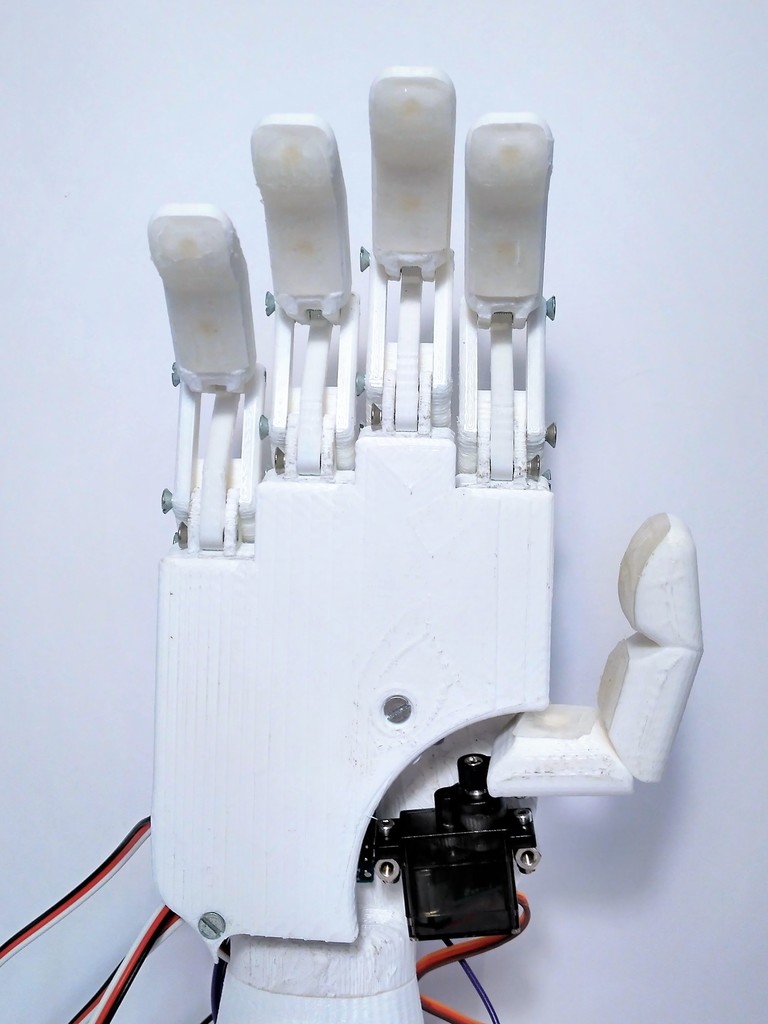
For this project, you will need: This is a preliminary version; you are likely to have to enlarge the diameter of certain holes using a 3mm drill in order to achieve proper finger movement and smooth out surfaces between movable parts. The following printed components made from PLA are required: 1x Palm 1x Bottom cover 1x Top cover 1x Thumb 4x Union 4x Distal Phalanx 4x Proximal Phalanx In addition, you will need the following printed components made from either PLA or a flexible resin to improve grip (we used an XYZprinting Nobel 1.0A): 4 x Grip finger phalanx 2 x Grip thump 2 1 x Grip thump 1 Required electronic components include: 1x Arduino Nano 4 x Actuonix PQ12R 1x Micro servo MG90S 6V Power supply 8 x M3 10mm prisoner screw 16 x M3 16mm prisoner screw 4 x M3 cover screw 4 x M2 10mm screw for the thumb and servo coupling You will also need some jumpers.
With this file you will be able to print Grasp Beta 1.0 with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Grasp Beta 1.0.