Inverted Inertia Wheel Pendulum - Control algorithm testing setup
thingiverse
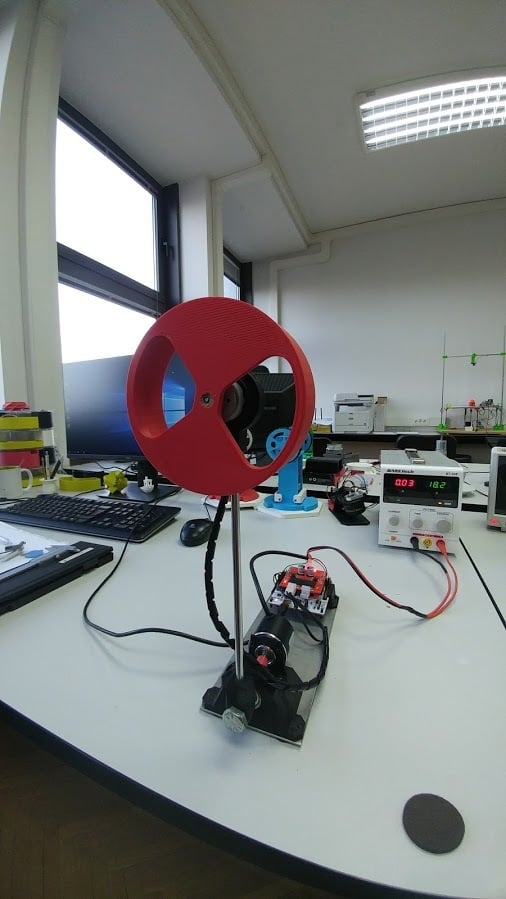
This is a high-tech experiment known as Inverted inertia wheel pendulum designed to challenge engineering students' skills in control algorithms. The process may seem unpredictable yet fascinating at the same time. Visit https://www.youtube.com/watch?v=POPPNbzDYbw for an eye-opening video that showcases this project's potential. The electronics and mechanics are remarkably simple, making it perfect for modeling and testing various algorithms. By using these basic components, students can easily grasp the underlying principles of control systems. The electronic setup consists of a Stm32 Nucleo F411re board paired with a monster motor shield and a Mabuchi RS-385 motor equipped with an encoder. These elements work together seamlessly to create a stable yet agile system. To bring this project to life, I relied on 3D printing technology using Flashforge Creator Pro and CR-10 machines. The prints were made from PLA filament with a layer height of 0.1 mm and an infill density of 50%. Based on my experience, these parameters yield excellent results for the Inertia wheel pendulum, but feel free to experiment with lower quality settings if you prefer. For those who want to dive deeper into this project, I've made all the files and software available on GitHub at https://github.com/askuric/inverted_inertia_pendulum. You'll find detailed explanations, CAD designs in Solidworks 2016 format (SLDPRT and STEP), and a comprehensive software stack. I had an absolute blast working on this project, and I'm excited to hear about your thoughts and potential upgrades. Let's collaborate and take this experiment to the next level!
With this file you will be able to print Inverted Inertia Wheel Pendulum - Control algorithm testing setup with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Inverted Inertia Wheel Pendulum - Control algorithm testing setup.