KINEO Quadruped
thingiverse
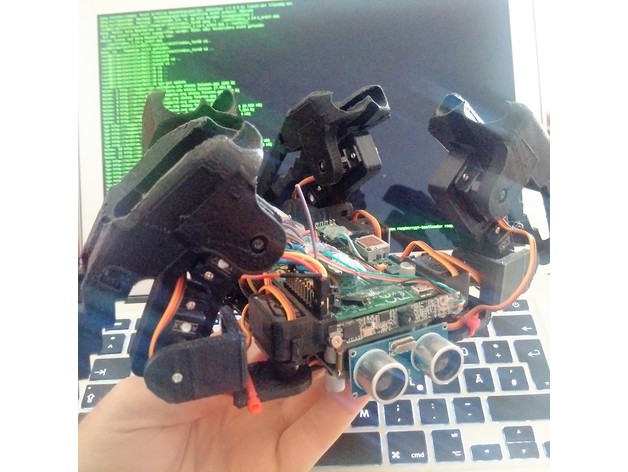
KINEO ist ein Roboterprojekt aus Deutschland Die Servos werden mithilfe eines Arduino Uno angesteuert welcher per I2C mit einem Raspberry Pi (Model A, B oder später B+) kommuniziert. Ziel ist es eine günstige Roboter platform mit unendlichen möglichkeiten zu entwickeln. Powered by 8 AA Akkus -http://youtu.be/wFWkaVhQbp4 KINEO is a robot project in Germany The servos are controlled using an Arduino Uno which via I2C with a Raspberry Pi ( Model A, B or B + later ) communicates . The aim is to develop a cheap robot platform with endless possibilities . Arduino code coming soon... this month... Instructions Druckeinstellungen 0.3-0.1mm Auflösung 33% Infill 2 Shells Servo dimensions: h 24.3 mm x l 23. 8mm x t 11.5 mm like the G12AM or G12DM Servo ! You must 4 servo motored modify so that the motion direction is correct. Use this manual: youtube.com/watch?v=_bkZcOS32Uc it´s very very easy and makes the robot more beautiful. Invert the 4 Servos in a front right and rear left starting from the front left clockwise. For now, this can be used Arduino code, but which is not of me and modify: http://www.engineer-this.com/quadruped.shtml
With this file you will be able to print KINEO Quadruped with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on KINEO Quadruped.