Kinetic Hand
thingiverse
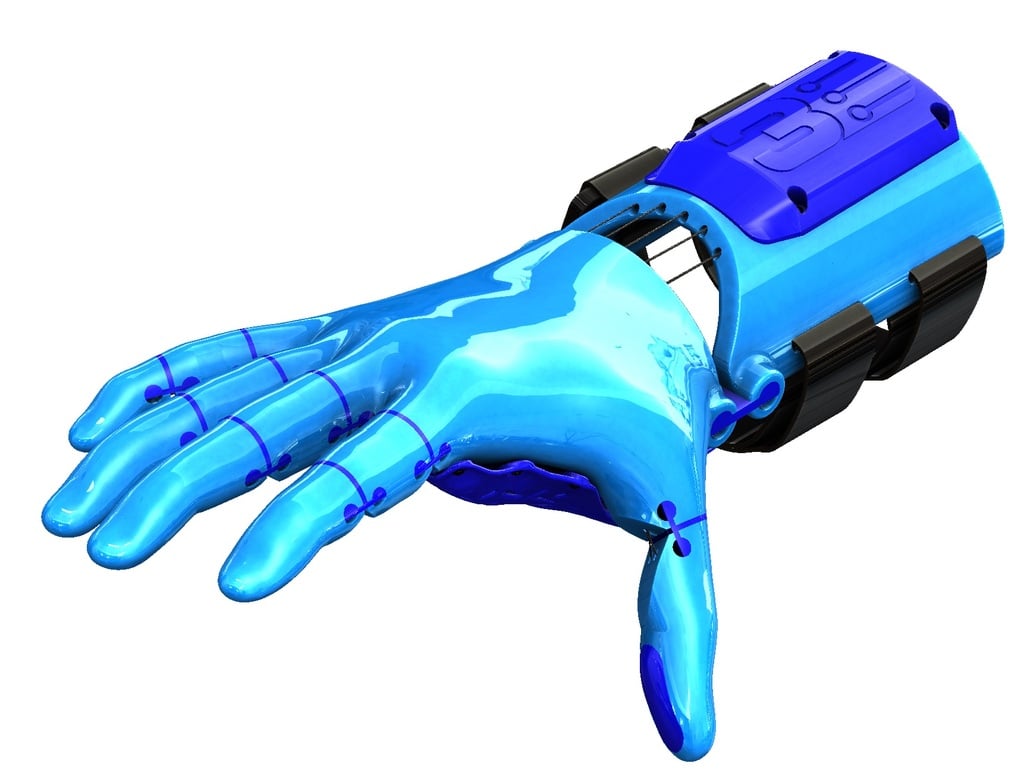
At Free 3D Hands, we have been designing, trialling and improving the Kinetic Hand for almost three years since November 2017. Over that period, we have made continuous incremental improvements to the design based on recipient feedback. The Kinetic Hand is a body powered device, and is designed to be used by people with congenital hand differences, with a functioning wrist to open and close the fingers. The Kinetic Hand design is being released under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International (CC BY-NC-SA 4.0) open-source license to encourage further innovation in this field, and improve global access to assistive technology. This design is released for trial and evaluation purposes only, and is intended to benefit certain individuals with specific hand differences and is not intended, and shall not be used, for commercial purposes. The acceptance of this design by Free 3D Hands Ltd, and any such information provided by the design team is presented as is without representation or warranties of any kind, express or implied, and is intended to be a free gift to recipients for the sole purpose of evaluating various design iterations, ideas and modifications. The Kinetic Hand must be used for only light tasks such as picking and placing of small objects, and not for any tasks that could be considered dangerous. Any individual associated with Free 3D Hands Ltd shall not be liable for any injuries or damages resulting from the use of any information or designs provided. The Kinetic Hand is experimental, is not classified as a medical device, and is for evaluation purposes only. In some cases, these devices will not be appropriate for each individual, and consultation with medical professionals and occupational therapists must be sought and obtained before use. Design Merits: Silent Operation The flexible hinges are designed to prevent any contact between rigid parts, allowing for silent operation of the hand. Moulded Silicone Finger Grips Using a scalable 3D printed mould, grippy silicone finger grips allow the fingers to better grip a wide range of objects. This also eliminates the need to use consumer products such as Lee Tippi Micro-Gel finger grips which are hard to source, expensive and limited to only a few sizes. Split Hinges The hinges are designed to fit from one side, and stretch fit from the other. This prevents the hinge from sliding out laterally. Hinges do not require any glue, and provide an ideal amount of elasticity to open the fingers. Dual Tendons The need to tie tendons in the fingers has been eliminated, with tendons looping back through the fingers and hand being tied only once at the tensioner. Flexible Tensioners The tensioners are made from an elastic material to allow individual fingers to come to a close while the other fingers continue to travel. There is no inter-connection between fingers, allowing for even grip distribution on a wide range of different object shapes. Part Numbering All of the finger parts, hinges and grips are individually numbered to assist during assembly, ensuring correct part position and orientation. Allowance for Partial Thumb By optimising wall thicknesses and tendon routing, we have created additional space inside the Palm cavity to allow for a partial thumb. Flexible Palm Cover The flexible Palm Cover improves comfort for the user, since this is where all of the force is applied during use. It can also stretch to help when inserting the partial hand. Adjustable Tensioner Positions Tensioner positions can be adjusted under the Gauntlet Cover to allow individual finger open and close positions to be incrementally adjusted to suit individual preference. Protective Gauntlet Cover Tensioners and tendon knots are protected by the Gauntlet Cover to improve durability and prevent damage. Improved Scalability The Kinetic Hand has been tested successfully between scales of 50% and 100% of the CAD model, which is designed at the scale of a large adult. We recommend 60% as the minimum scale to use for part strength and ease of assembly. Printing Support Elimination All parts have been designed and oriented to eliminate the need for printing supports which are difficult and time consuming to remove. Smooth Part Surfaces The parts have been oriented to minimise the appearance of 3D print layers, whilst maintaining strength in design. Increased Durability The flexible hinges allow fingers to be bent and twisted to the same degree as a human finger without breaking. Three Directional Scalability Since the Kinetic Hand uses flexible hinges rather than snap pins, it can be scaled in X, Y and Z directions independantly without compromising part fitment or function. Eased Fitting Tolerances Regardless of hand scale and size, the flexible hinges are designed to fit tightly with no need for fitting tolerances at different scales. Reduced Closing Angle The Kinetic Hand only requires 18 degrees of wrist movement to allow the fingers to fully close, making it able to be used by people with very limited wrist movement. Multiple Palm Variants To accommodate for various levels of hand difference, we have designed multiple palm variants to suit these conditions.
With this file you will be able to print Kinetic Hand with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Kinetic Hand.