KL-20 octoped robot spider
thingiverse
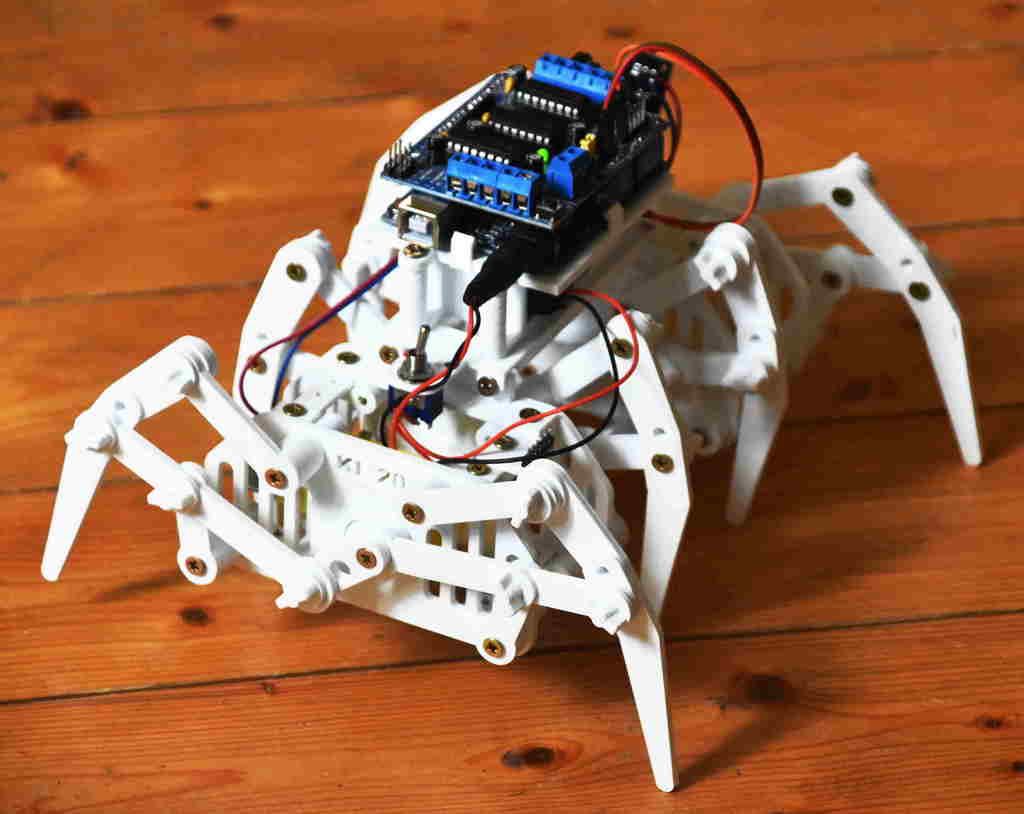
KlannBot KL-20 Ce robot octopode se base sur le mécanisme de Klann. Il s'agit mécanisme plan conçu pour simuler l'allure d’un animal à pattes et remplacer la roue. Le mécanisme se compose d’une « jambe » qui entre en contact avec le sol, d’une manivelle, de deux culbuteurs, et deux biellettes, tous reliés par des liaisons pivots. Huit systèmes de ce type assuren la mobilité de ce robot. Projet opensource de Roberto Hamm http://robotix.ah-oui.org/site/main.php?found=200317-klannbot-KL-20
With this file you will be able to print KL-20 octoped robot spider with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on KL-20 octoped robot spider.