mapping robot
thingiverse
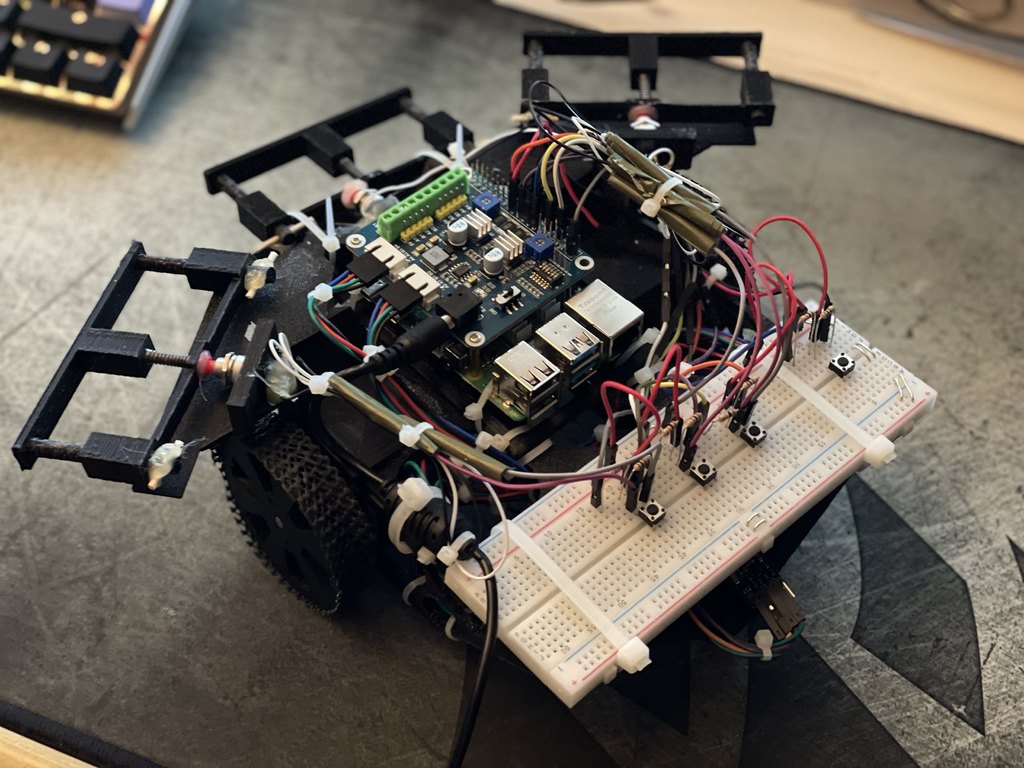
This robot drives around and creates a map of your room when it bumps into stuff (like a roomba but worse, without a battery and slower). This is not actually an effective way of mapping your room, nor accurate enough to be useful for anything where a map a five year old drew wouldnt be enough. The only reason I made this is that its part of a school project and more of a proof of concept. This is everything you need if you actually decide to build this for whatever reason: - 1x Raspberry Pi 4b + microSD card - 1x Waveshare Stepper Motor HAT (https://www.waveshare.com/wiki/Stepper_Motor_HAT) - 2x NEMA 17 Stepper Motor 1.5a 12v (shouldnt be bigger than 42x42x39mm, otherwise you wont be able to fit them) - 1x 5a12v DC PSU - 4x Arduino 6x6mm push button (7 if you want some on the breadboard for debugging, recommended) - 3x ballpen spring 20mm - 4x 10koh resistor - 4x 100oh resistor - 8x m3 12mm screw - cables to connect pins with buttons - zipties - Breadboard (not strictly needed but makes it easier by requiring less soldering) - glue All the code is in the linked Github repository. https://github.com/Speckkatze/mappingRobot
With this file you will be able to print mapping robot with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on mapping robot.