MK5-6 STEPSTRUDER NEMA 23 DIRECT DRIVE PIVOTING FILAMENT PUSHER
thingiverse
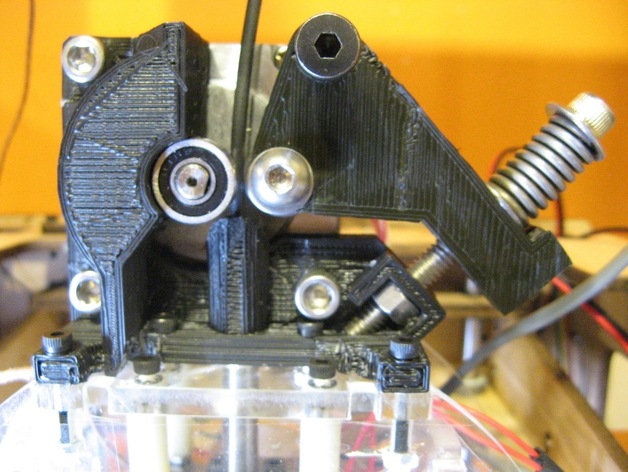
This is a direct drive extruder mechanism that fits with the hotend and dinos of a MK5-6. I wanted to move to a stepper drive extruder but didn't want to wait three weeks for makerbot to ship their new beefy nema 17. I also had a lot of issues with the delrin plunger. I liked the idea of a ball bearing to provide the pressure between the filament and the drive wheel as in a wade's but didn't like the 4 bolts to adjust to change filament. My other design goals were to leave everything as accessible as possible and provide some mechanical advantage where it makes sense. The worm grove in the drive gear is made very close to the face of the motor while the motor shaft ball bearing rides at the end of the motor shaft while having the shaft pass completely through it. I also increased the length of the teflon guide tube to come to right below the drive wheel. The pivoting arm that applies pressure to the filament forcing it against the drive gear allows one screw and spring pair to take the job of four. It also means that the screw can be backed off completely and the arm rotated out of the way to provide access without having to be completely removed. The relative positions of the bearing and tensioning screw on the arm give something like a 2:1 advantage of filament pinch strength vs spring force. I also included a hat that accepts a piece of sponge or similar to remove dust from the filament as it is being drawn into the extruder. The hat as well can pivot out of the way and has a sloping bottom to make it simpler to feed new filament through. The sizing for everything is imperial in this case but I can make other versions is people have specific requests, I'll also include the source files. Instructions The build process is fairly simple. I used a nema 23 that is rated at about 144oz-in at 3amps because I had several lying around. In practice I have been running it at more like 2.5-2.75. The motor gets rather hot without any cooling but so far hasn't caused any problems. Most nema 23s I have found have four mounting holes at 0.205"(5.2mm) diameter. I tapped the aluminum face plate to 1/4-20 to simplify construction, it seems like an m6 tap would work as well. I taped over the holes to keep from getting swarf in the motor, its less likely to be a problem because its not magnetic but it still seems like a good idea. If you don't have taps or don't want to permanently alter your stepper you could use nuts instead. The tensioner arm is screwed together by two #6 x 1/2" sheet metal screw. The back half of the tensioner has a smaller holes for the sheet metal screws to dig into, the front holes should be a slip fit, I drilled them out to 1/8" before assembly. The back half is tapped for 1/4-20" ( or 6 or 8 mm ) for the bearing retainer screw. Both sides are put together and then the pivot hole was chased to 5/16". I have used both a 5/16" shoulder bolt with 1/4-20 threads and a 5/16" OD 1/4"ID sleeve bearing riding over a 1/4-20" bolt as a pivot. Both work fine. You could probably also get away with just using whatever bolt goes through the pivot corner riding on bare plastic. The shoulder bolt or bearing only cost around $1 so it made sense for me. The main body will likely need its holes chased depending on the size of your fasteners and the calibration of your printer. I drilled the stepper mounting holes to 1/4" along with the teflon tube support. I chased both holes in the hat to 1/8" If you have cut your MK5 teflon tubing to the length used in the original you may need to order more. In the states McMaster sells it for $2 a ft 8547K232 Tube Made Of Teflon(r) Ptfe, 1/4" Od X 1/8" Id, 1' Length I've also bought 8547K221 Tube Made Of Teflon(r) Ptfe, 1/4" Od X 1/16" Id, 1' Length which looks like it should work with 1.75mm feedstock though I haven't tried it yet due to not having any 1.75mm plastic. UPDATE I've tried the 1/4 X 1/16" teflon with makerbot 1.8mm abs with no luck, the much thicker wall of teflon makes it less able to stretch, I'll see if I can't find something else that fits To cut the right length I stuck the whole piece down the hotend and then slid the main body over it without the motor or the tensioner arm in place and then marked it and cut it off as close to the drive gear as I could get. The ball bearings I used were just ones I had lying around, 1/4" ID by 5/8" OD by 3/16" W Others would work as long as they fit, the model could be changed or hacked on a bit after printing. My nema 23s have 1/4" shafts so I drilled the makerbot drive gear out on a lathe, that could probably be done with a drill press or hand drill because it is just expanding a hole slightly.
With this file you will be able to print MK5-6 STEPSTRUDER NEMA 23 DIRECT DRIVE PIVOTING FILAMENT PUSHER with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on MK5-6 STEPSTRUDER NEMA 23 DIRECT DRIVE PIVOTING FILAMENT PUSHER.