Modular Robotic System - Standard Servo Pivot Joint
thingiverse
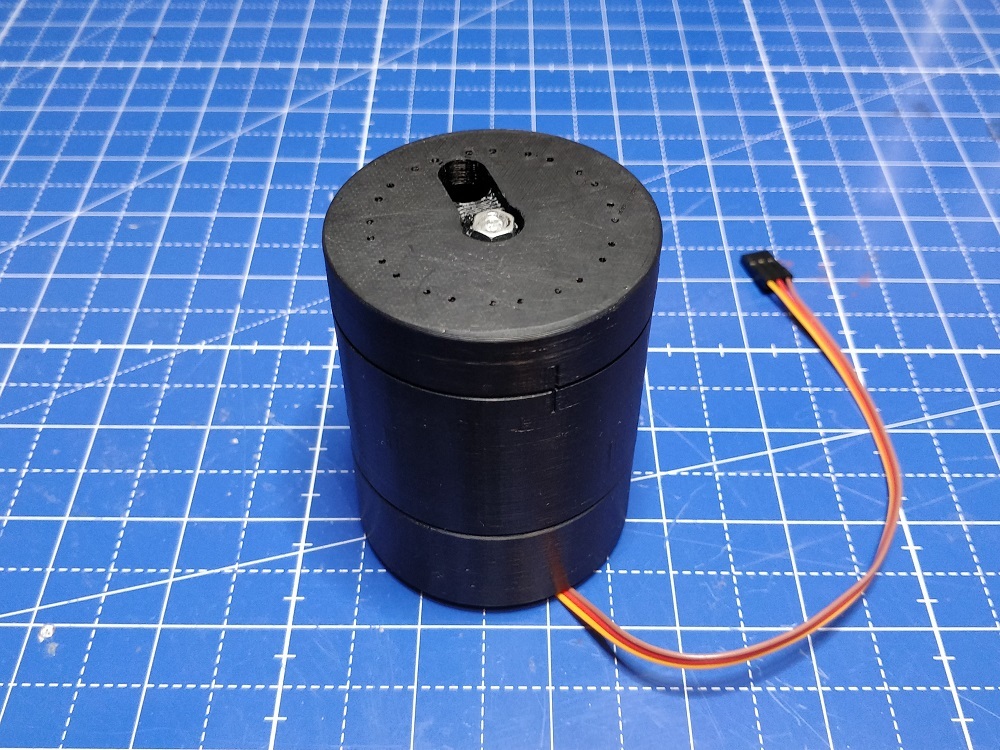
This is a pivot joint for robotic applications which is designed to be used with the standard size servo MG996r or MG995. The pivot joint has a gear ratio of 3:1 so the range of motion will only be about 60° with a standard servo. But with an easy servo hack and some additional printed parts it is possible to use the whole 180°. Therefore the potentiometer of the servo has to be removed from the servo housing and flanged directly to the shaft of the joint. Don't forget to swap Vcc and GND due to the reversal of rotation. Needed for the standard 60° range of motion: Parts: -- body -- large gear -- small gear Materials: -- 1x MG996r or MG995 Servo incl. attachments -- 2x 625 5mmx16mmx5mm Ball Bearing -- 1x M4x49mm threaded rod -- 4x M4 Nut Additionally needed to use the full range of motion (requires servo hack): Parts: -- poti replacement -- poti hub -- poti flange -- end stop (optional for protecting potentiometer) Materials: -- 4x 2,6x8mm self tapping screw (for attatching the poti hub) -- 1x 1,7x8mm self tapping screw (optional for attatching end stop) 2,6x8mm self tapping screws can be used for attatching the joint to other parts. The wires can be fed completely through the joint in both directions for a clean wiring setup. This thing is designed to be used with Didis Modular Robotic System. Go and check out the collection: <a href="https://www.thingiverse.com/didismakerindustries/collections/didis-modular-robotic-system" target="_blank">Didis Modular Robotic System</a>
With this file you will be able to print Modular Robotic System - Standard Servo Pivot Joint with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Modular Robotic System - Standard Servo Pivot Joint.