Omnidirectional Selfdriving Robot With Mecanum Wheels
thingiverse
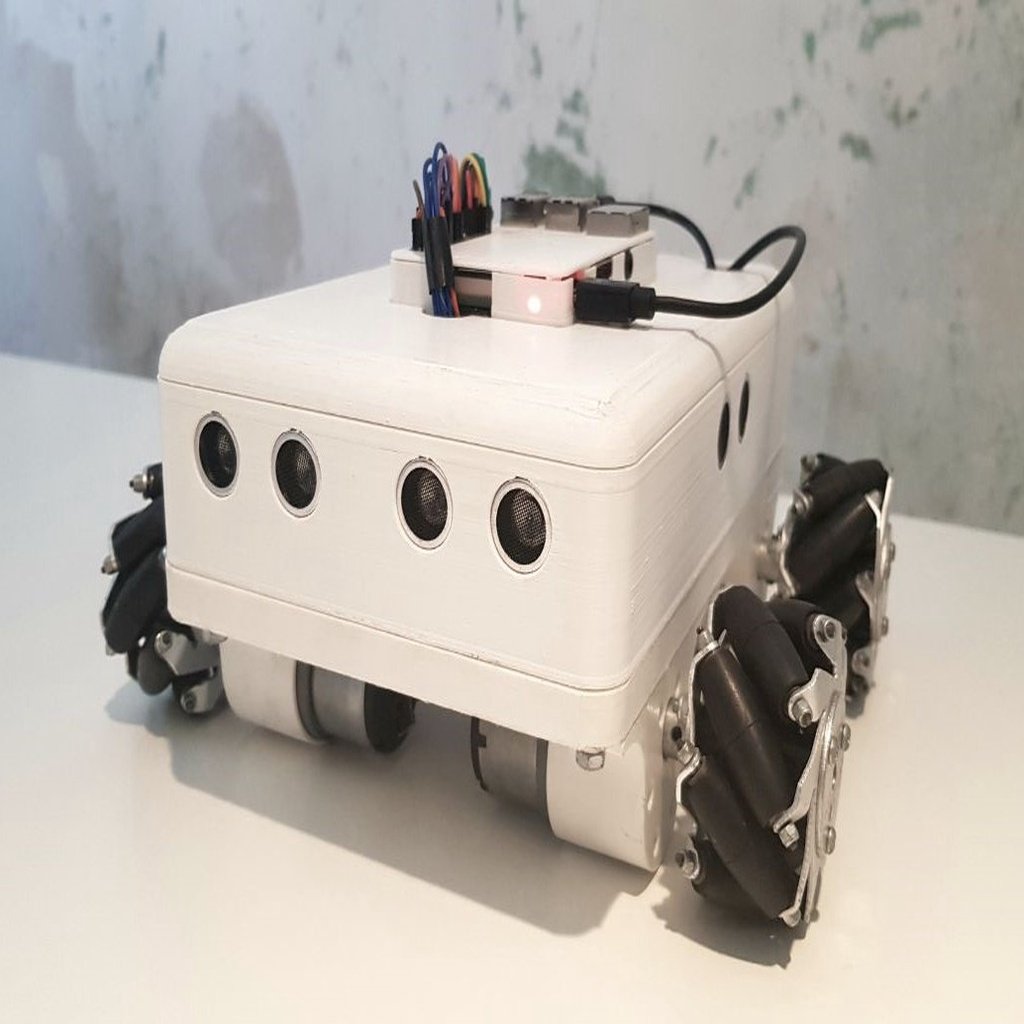
This is a revolutionary omnidirectional self-driving robot controlled by a powerful Raspberry Pi with innovative Mecanum wheels. You can take command of it from anywhere with our open-source software on your smartphone, giving you complete control and precision. It's equipped with advanced sensors that detect obstacles and automatically navigate around them. To build this incredible machine, check out the website for more information at http://www.intrabotics.de//forki.html You'll need to print or acquire: - 1x sturdy housing - 1x durable ground plate - 1x protective housing lid - 4x motor mounts - 12x connectors - 1x custom Raspberry Pi housing, available on Thingiverse at https://www.thingiverse.com/thing:3366363 The hardware requirements include: - A Raspberry Pi B or B+ - 2x L298N Dual H Bridge DC Stepper Motor Driver Modules for precision control - 4x 60mm Mecanum Wheels for smooth navigation - 4x 12V DC Metal Gear Reducer Motors (130 RPM) for reliable performance - 8x M3x8mm Screws and 8x M4x15mm Screws for secure assembly - 16x M4 Nuts for added stability - A 7.2V Battery for long-lasting power - An LM2596 DC-DC Converter for efficient energy transfer - 4x HC-SR04 Ultrasonic sensors for advanced obstacle detection - 12x 1kΩ Resistors for precise circuit control Want to learn more about this incredible robot? Read the article on Medium to discover how you can build it yourself: https://medium.com/p/c47bc80c6780/ Created by Patrick Hallek, a visionary inventor and innovator. Learn more about him at https://www.linkedin.com/in/patrick-hallek/.
With this file you will be able to print Omnidirectional Selfdriving Robot With Mecanum Wheels with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Omnidirectional Selfdriving Robot With Mecanum Wheels.