remote direct extruder with flexible drive shaft and worm gear - remote extruder - Mix of Titan and Bowden Extruder -
thingiverse
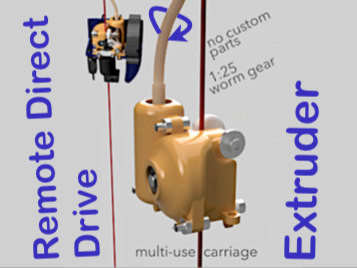
Find the new description and download of all files [here](https://www.creatgraphy.com/05/2020/allgemein/rdd-585/). (Due to a upload bug, I moved the files to my website) Description: The presented solution gives a reliable way of printing direct, without a stepper motor on the extruder carriage. A flexible drive shaft is used to transfer the rotational movement of the stepper motor to the carriage. A worm gear reduces the rotational movement by 1:25 and a threaded gear converts the rotational movement in a linear motion, which drives the filament through the extruder underneath the gearbox. 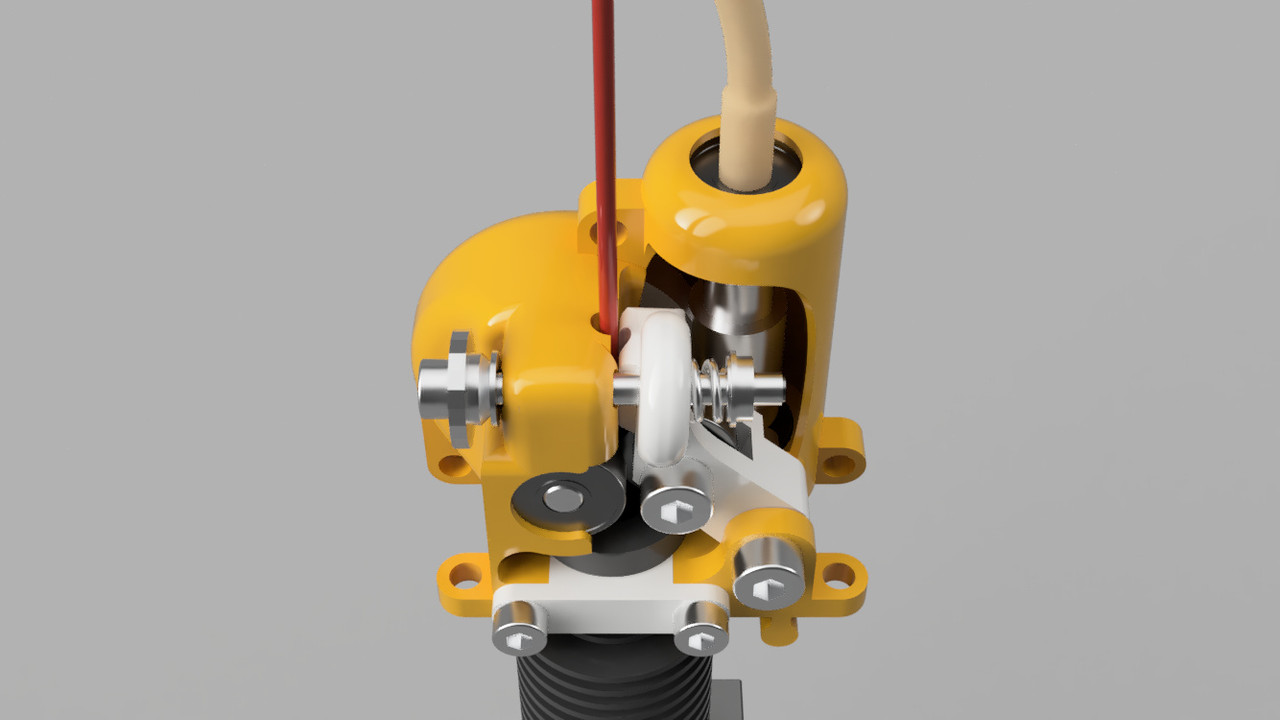 We all know the frequently asked question "direct drive or bowden extruder ?" And we all know, that there is no right or wrong. Both System have its benefits. In my opinion, the direct drive is more reliable and exact in extruding the material. The direct drive extruders are very heavy and therefore cannot be driven with high print speed. The stepper motor nema17 weights about 300g, which is too much for the carriage of a hypercube evolution. Notes on the project: Drive shafts do not work exact. The drive shaft in the project has a translation shift twist of ± 45 percent. This is why its not recommended to drive your 3d printer directly with the drive shaft. I use a 1:25 reduction gear to eliminate the error.The setup works exact and reliable with this twist. 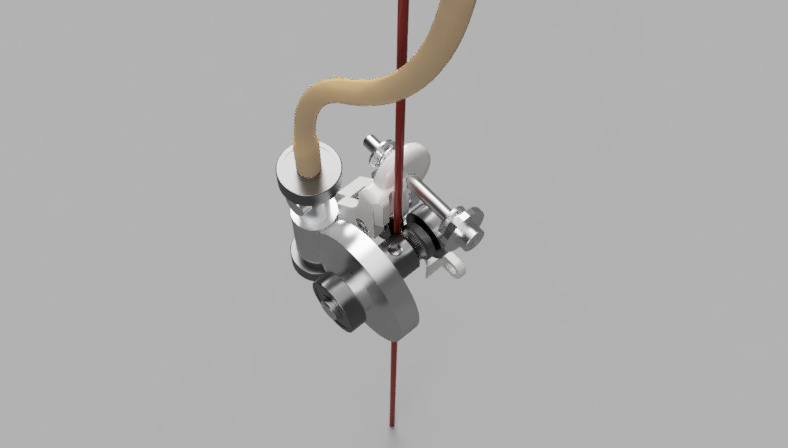 Notes on the print: The gearbox is designed to be lightweight and easy to print. You will need to use support material on the outside of the parts of the gearbox. The inside has to stay free of support material, because otherwise the remains of the removed support will interfere with the fit of bearings. Notes on the installation: % I tried to do a good job at the costs of the parts. All parts are manufactured in china and are available for a reasonable price at multiple stores or can be printed via FDM. I recommend a step-up gearbox for the stepper motor of the extruder for high printing speeds. This feature will enable faster retraction speeds. OCD3D designed a printable solution here [4] constraints: 1.75mm plastic diameter hypercube evo / hypercube carriage BOM: * worm gear reduction * 604 bearing (x2) * 695 bearing (x3) * flexible drive shaft 4mm diameter * mk8 threaded gear * Radial Fan * M3 Screws and Nuts * M4x16 Screw (x2) * Screw of Heatbed 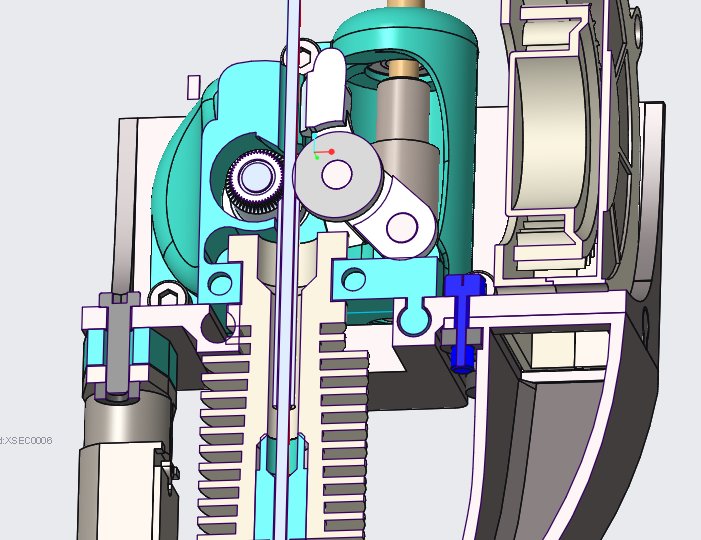
With this file you will be able to print remote direct extruder with flexible drive shaft and worm gear - remote extruder - Mix of Titan and Bowden Extruder - with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on remote direct extruder with flexible drive shaft and worm gear - remote extruder - Mix of Titan and Bowden Extruder -.