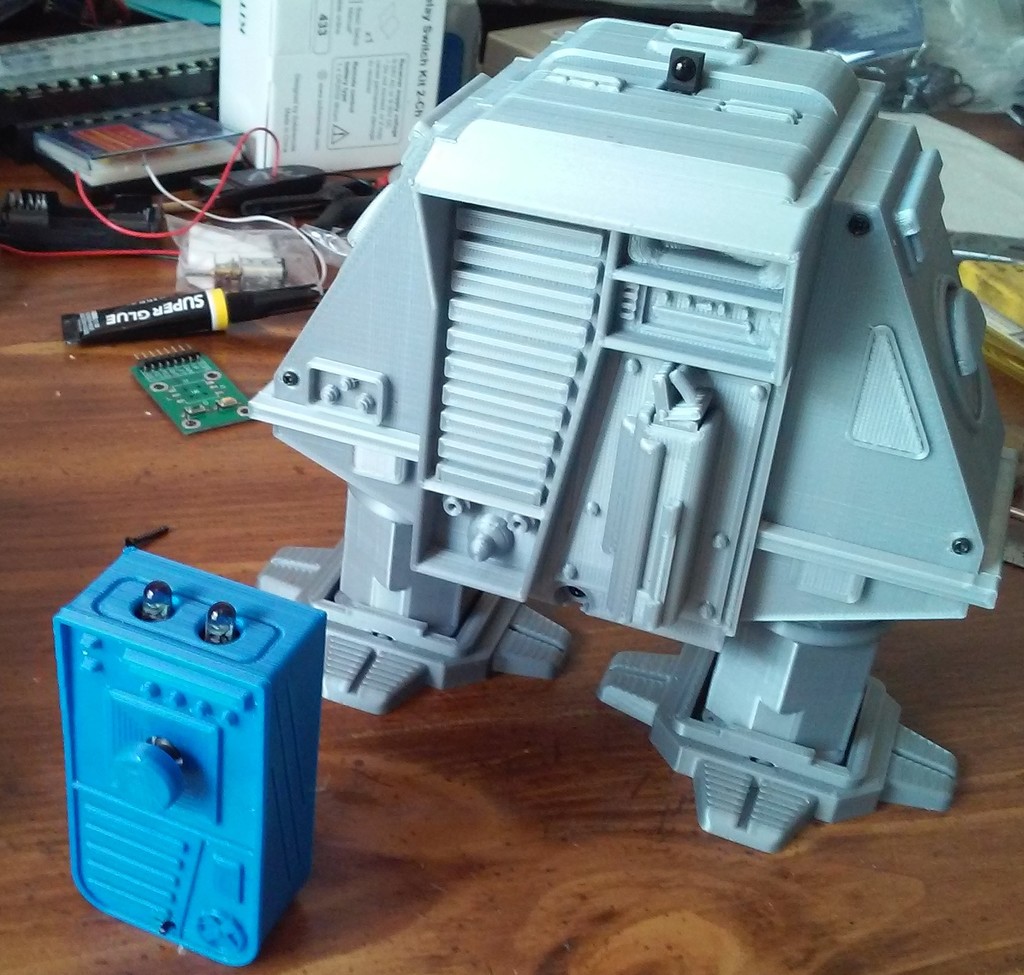
Remote for Steerable Robot Drone
prusaprinters
<p>This is a remote for the "Rocking Body Walking Robot Drone #5 steerable version " I posted earlier:<br/> <a href="https://www.thingiverse.com/thing:3102186">https://www.thingiverse.com/thing:3102186</a></p> <p>The remote wasn't necessary but I thought it matched the look of the robot better than a universal TV remote. It uses an Attiny85 programmed with the Arduino IDE.</p> <p>The input is from a digital thumbstick sold on Ebay as "Navigation Button Module 5D Rocker Joystick Independent Keyboard for Arduino MCU". The thumbstick has to be de-soldered from the board so it can be used in the project. It has left right up down and a button when the stick is depressed. The button isn't used in this project.</p> <p>The power supply is is made from two 2032 cells wired in parallel for 3 volts. I did this because 6 volts is a little high for the Attiny. Putting the batteries in parallel also allows more current for the leds. I modified one of these battery boxes from serial to parallel:<br/> <a href="https://www.banggood.com/CR2032-Button-Battery-Holder-Case-With-OnOff-Switch-p-970429.html?rmmds=search&cur_warehouse=CN">https://www.banggood.com/CR2032-Button-Battery-Holder-Case-With-OnOff-Switch-p-970429.html?rmmds=search&cur\_warehouse=CN</a><br/> Modifying the case was done by drilling a hole and soldering a couple of wires. The included pictures show where to solder the wires and how to orient the batteries in the case. There is no polarity protection, so make sure you get the batteries in right. Check the polarity and voltage with a meter just to make sure.<br/> The switch was removed from the battery box and mounted in the remote case.The case and switch are just hot glued in place.</p> <p>I made my pc boards on a small cnc engraver but it can be built on perf board. The thumbstick is a surface mount part so it's mounted on the solder side of the pcb. It has a couple of small locating nubs on the back side . You have to trim them off so it will lay flat. I used flush cut wire cutters but an exacto knife would work. The other parts are mounted on the oposite side of the board. The 3D print files include a template for locating the thumbstick and cutting out the board, so the stick lines up with the hole in the remote case. The picture shows how you can line up the stick terminals to the solder padsusing the template. You can then mark the outline of the board and cut it out.</p> <p>The pc board was designed with Eagle. I didn't have the navigation button or thumbstick component so I just placed some pads manually. The board has one jumper. The location of the jumper is shown in the included picture. I originally designed the board with another jumper in case I wanted to hook the middle button up to the IO pin that the reset uses. This requires changing the fuse settings on the Attiny. This is why 4 of the holes in the board are unconnected. I never found a need for using the button so none of that circuit was used. If you build it on perf board just connect pin 1(Reset) to 3V through a 10K resistor. The connections labeled TP6 and JP2 can be left off the board. The power connections are on the JP1 connector.</p> <p>The electronic parts needed are:<br/> 1 X Attiny85<br/> 2 X 33 Ohm resistors for current limiting to the leds<br/> 1 X 10K resistor to hold the reset line high<br/> 1 X 1K resistor for limiting current through the base of the transistor<br/> 1 X NPN transistor ex: 2N2222 or 2N3907<br/> 2 X IR leds: I used 2 from an old remote<br/> 1 X 2032 battery box with switch:<br/> <a href="https://www.banggood.com/CR2032-Button-Battery-Holder-Case-With-OnOff-Switch-p-970429.html?rmmds=search&cur_warehouse=CN">https://www.banggood.com/CR2032-Button-Battery-Holder-Case-With-OnOff-Switch-p-970429.html?rmmds=search&cur\_warehouse=CN</a></p> <p>1 x navigation button:<br/> search Ebay for "Navigation Button Module 5D Rocker Joystick Independent Keyboard for Arduino MCU"</p> <p>4 X 2MM screws approximately 5MM in length</p> <p>I used this Attiny core: <a href="https://github.com/SpenceKonde/ATTinyCore/blob/master/Installation.md">https://github.com/SpenceKonde/ATTinyCore/blob/master/Installation.md</a><br/> The IR code doesn't use any liraries. It uses delay functions. It is based on some code from Dave Jones EEVBLOG. For it to work you have to have your fuses set for an 8 Mhz clock. If the program doesn't work the Attinys clock may have to be caibrated. I programmed 2 different Attiny 85s and they both worked with the factory calibration. You can program the Attiny with an Arduino set up as a programmer but I used a TL866 stand alone programmer. The TL866 programs the chip in HV mode so you can use the reset line as IO, or recover a chip that has been bricked by a fuse setting. I have included the hex file in case you have a stand alone programmer.</p> <p>I've included a new program for the Arduino Pro Mini in the robot. It is still compatable with a sony remote like the original program.<br/> The Eagle board and schematic files are also included.</p> <p>The 3D printed parts are the top and bottom of the case and a faceplate that is glued to the top case. There is also a small button that is glued to the button that is inclded with the thumbstick. The bottom of the case includes extrusions that will hold the pc board tight to the top case. The case is held together with 2MM screws. The battery box is hot glued to the bottom of the case. Don't use too much glue in case you need to disassemble the remote to change batteries.</p> <p>I liked the way it turned out and it matches the look of the robot pretty well. The range is at least 10 feet(3 meters). The navigation button or thumbstick is not the highest quality and doesn't have a solid feel. I think one without the button fuction would have a better feel. Building the remote is not as difficult as building the robot but it still involves soldering and programming the chip.</p> <p>Good luck,<br/> Rick</p> <h3> Print Settings</h3> <p><strong>Printer:</strong></p> <p>Folger Tech</p> <p><strong>Rafts:</strong></p> <p>No</p> <p><strong>Supports:</strong></p> <p>No</p> <p><strong>Resolution:</strong></p> <p>.2</p> <p><strong>Infill:</strong></p> <p>20%</p> Category: Robotics
With this file you will be able to print Remote for Steerable Robot Drone with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Remote for Steerable Robot Drone.