Robot leg v.HS-55
thingiverse
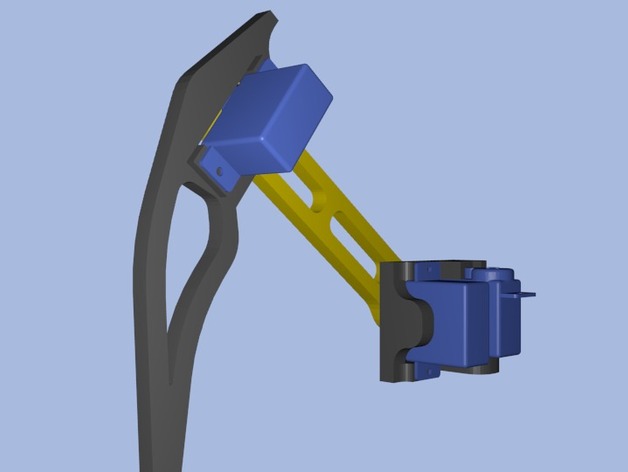
THis is an early test for a Spider robot leg assembly with Hip x-rotation and leg bend servos. Hips z-rotation bracket is still work in progress and after that I get to design the body to mount them into. This thing is designed to be mounted with HiTec HS-55 servos and 1Mx10 -ish screws. The legs weight and structure is as light as possible and still with kinda cool look. by my calculations the servos will be able to hold the robot weight and be able to walk quickly while supporting its own weight and the controller units weight (at this point AtMega238 micro controller ) but not the power supply, but after the whole design is finished there may be an option to reduce the battery packs weight so that the robot can carry it and be truly autonomous. I'll be posting more progress after I've fixed my walking cycles and designed the missing joint. !!--!! UPDATE !!--!! Added prototype images for the upcoming double servo holder for hip joint. I'll add .stl once I've printed and tested the new design and figured out how to relieve some torque from the servos drive shafts. The updated tip part is rotated so it is in contact with the beam bridge to add a little stiffness to the leg assembly. Also I'm terrible at spelling so corrected few errors here and there ;) Instructions The model is kinda self explanatory. Print it solid and add 2 Hitech SH-55 servos to the mounting points and start programming walk cycles you prefer. If you have problems with resolution of your print you may need some files and 1mm drill tips to open up the holes to have everything fit properly but in my first tests that was left to absolute minimal.
With this file you will be able to print Robot leg v.HS-55 with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Robot leg v.HS-55.