Robotic Hand v3.0
thingiverse
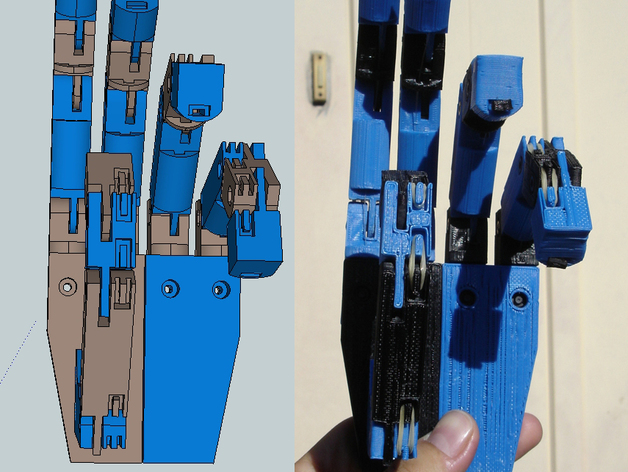
Introducing Robotic Hand Version 3.0 - a significant improvement from its predecessor, designed with TOM in mind. This new version requires less non-printable hardware, uses less plastic and printing time, necessitates minimal post-print work, and demands far less force for manipulation. A video showcasing its functionality can be found here: http://youtu.be/7AlyGPnU6U0. For reference, Version 2.0 is available at http://www.thingiverse.com/thing:2408. This model doesn't require scaling and only needs light sanding for smooth rotation. A special thumb redesign is planned for Summer 2012. Loctite blue can be used to prevent screws from falling out. It uses no metal bearings, and fishing line assists in finger manipulation. The model comprises 32 plastic parts (10 distinct), 23 M3x12 screws, 23 M3 hex nuts, 5 fishing lines, and 15-45 dental rubber bands per joint. Feel free to ask questions or share feedback! Don't forget to give attribution.
With this file you will be able to print Robotic Hand v3.0 with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Robotic Hand v3.0.