Slip-On Plastic Forearm for the RoboNova-1 BiPedal Robot
thingiverse
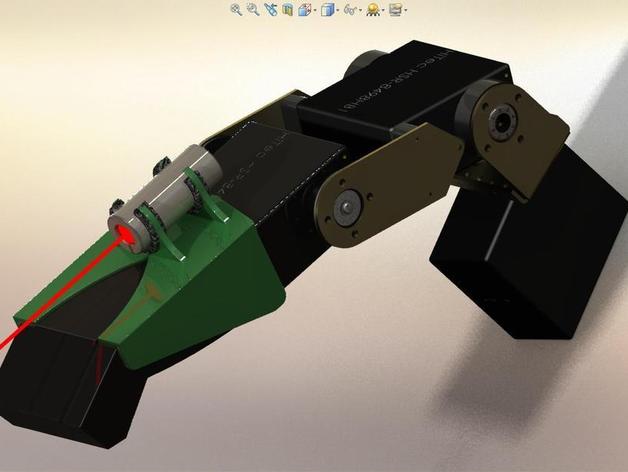
This forearm is designed to slip over the existing forearm and be temporarily stuck on using a drop or two of rubber cement or other easy to remove sticky ... You can find a bunch of 1mm thick aluminum/alloy part files I've created in the 3D Content Central Library online ... it's FREE!http://www.3dcontentcentral.com/Search.aspx?arg=wperko These files are importable to the Microsoft Robotics Studio ... another FREE PC software tool ... Sorry, I don't know the strengths of the MakerBot printing materials, nor the tolerances needed in design ... hence I need a MakerBot to learn and adjust my sketches to conform properly ... Okay, for those not clever enough to make large overhangs ... I added the flat version for MakerBoting. I should note that sketch orientation of designs is -90° out of whack from SolidWorks to the MakerBot files. This is another of many entries to the makezine.com/go/makerbot contest ... blog.makezine.com/archive/2010/04/makerbot_giveaway.html Instructions After you MakerBot this ... use a rubber grommet or tape whatever to snugly fit your small short laser pen into the 12mm diameter mounting bores ... I plugged my laser into Port 15 on the RoboNova-1 and set it to turn ON/OFF using a TTL-2-PWM adapter (easily found in hobby stores) ... MakerBot a few of these and give them a try ... then send me a half-dozen please. If you successfully make this with a 3D printer please send me the build-file and machine type so it can be uploaded here for others to use.
With this file you will be able to print Slip-On Plastic Forearm for the RoboNova-1 BiPedal Robot with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Slip-On Plastic Forearm for the RoboNova-1 BiPedal Robot.