Small Powered Winch
thingiverse
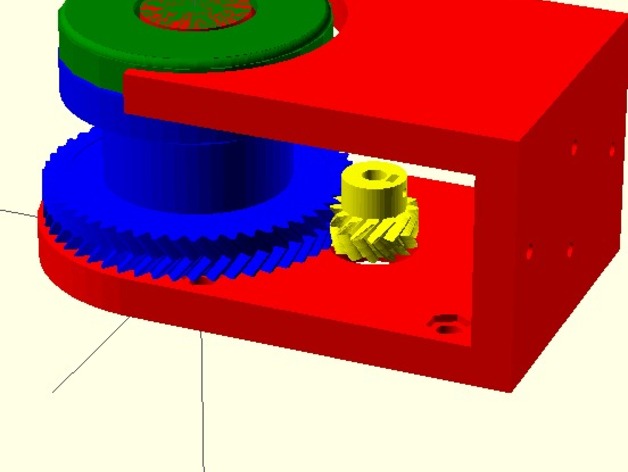
This is a first attempt at a computer controlled, stepper motor driven, powered winch. Like the winch design it is based on, there are ball bearing races on the base around the spindle (both red), on the spindle itself (with break away support structures) and on the underside of the screw on cap (green). These are filled with 2mm ball bearings to provide a smooth support for the reel (blue). The reel is turned by the drive gear (yellow) which is attached to the shaft of the stepper motor which is mounted up through the bottom of the base. The current stepper size is NEMA23, but the unit can be scaled up for larger drive. There are many possible uses including running a "zip line" for a ghost that is raised and lowered with a semi-random pattern, or any other light weight object that needs to be raised and lowered automatically. I want to use three of them to make a "flying" area robot like the "SkyCam".http://en.wikipedia.org/wiki/Skycam This was inspired by the "WireBot" project originally featured in Make Magazine:http://makezine.com/projects/Build-a-Wirebot/ (if the original link doesn't work, here is the archive)http://web.archive.org/web/20120806013138/http://makeprojects.com/Project/Build-a-Wirebot/744/1 And the original is here:https://www.synthetos.com/grblshield-wirebot/ and finally, the python program to pre-process the G-Code from XYZ to cable length is here:https://github.com/synthetos/WireBot Because the position of the wirebot is easily calculated from the length of cable released by the winches, there are no positioning problems for the robot. Complex feedback systems or micro GPS are not required to position accurately over a given area such as a room or a hall. The applications for a cable positioned robot are mindboggling. Imagine a robot hanging above a garden on three poles that can "fly" over the plants taking pictures for remote review, probing the soil for moisture level, and if fitted with a gripper or something like the "Awesome Auger^" could remove weeds, dig small holes to plant seeds, etc... A platter hung under the wirebot could carry food from kitchen to tables in a robot restaurant. A simple gripper under the wirebot could be programmed to pick up objects from the floor of a kids room in a pattern which blindly covers all open floor space. All objects could be dropped in a hamper, or held in front of a camera for machine identification and then sorted into the appropriate bins. What to get kids excited about robots? Done! Delivery of product, food, snacks, or anything inside a large hall or event field could be automated and traffic avoided. Guiding people from point a to point b could also be more safely and practically done by wirebots than by quadcopters as has been proposed. See instructions for the current state of attempts to print this thing. Instructions Finally! As of 2016/02/20, it now appears to work in Customizer. See http://www.thingiverse.com/thing:1356486 for proof. You should get multiple files after customizing, one for each part, in position to print, and the complete assembly. UPDATE 2016/03/15 Base length compensates for motor size better. Supports at least NEMA 34 UPDATE 2016/02/18 Attempting, 3rd times the charm, to make it customizable. Needs to make separate .stl files for each part, positioned for printing. This can be selected manually, and when customizer publishes the new part, it /should/ make separate .stl files for each part. I had introduced an error by combining all the files UPDATE 2016/02/17 Attempting, again, to make it customizable. Copied all include files into the main source file. Apologies in advance if that violates anyone's license. I did attribute at the point where each file was pasted in. UPDATE 2014/06/25 Attempting to make it customizable UPDATE 2014/02/01 (Hope everyone had a great holiday season) Corrected some overlapping faces that made slic3r screw up the teeth on the reel. It still complains about holes, but seems to work. UPDATE 2013/11/10 NEMA Mount now has a slot. Added countersink to the mounting holes for the winch itself. Improved the ability of the wench to scale by moving the lower bearing in when the mounting slots are larger. UPDATE 2013/11/06 It dawns on me that the NEMA mount needs to be a slot rather than a single point so the drive gear can be moved in and out a bit from the reel gear. Duh. Working on those changes; stay tuned. UPDATE 2013/10/26 Many thanks to Uyen for the first actual print! The bulk of the winch is fine, with some minor issues. The only major problem was the little drive gear; my design failed to take account of the motor shaft length. Turns out the motor shaft isn't long enough for the hub to be on that end. I've redesigned that part with the hub on the other end, and adjusted the diameter of the center hole to better fit the actual motor shaft. Minor issues: The ball bearings do not roll perfectly in the races due to little errors in the manufacture, and the reel was a tiny bit loose. Also, there was no allowance for the pilot circle in the NEMA mount template (not a huge deal). These minor issues have been compensated: The races are a tad looser, the reel hole a tad tighter, and an impression for the pilot disk on the stepper has been added. UPDATE 2013/10/15: Found a major stupid error which accounts for the scaling problems. Resized the unit to be quite a bit smaller to make it easier / quicker / less costly to print since other errors will probably be found. Should still be large enough to be useful. The dated .zip file has all the .scad files used. The main wench.scad file needs the source files indicated. The .stl files are rendered for each part. Base, Reel, Cap, and Drive gear. OLD: This thing was modeled in OpenSCAD using mm units which are the default in OpenSCAD. The STL files appear to be the correct size when opened in FreeCAD or MeshLab, yet when printed, Slic3r seems to want to make the object at about double size. I can't find any mention of this problem on the net. I have to scale the print to 50.8% to get an accurate size... 50.8 is exactly 25.4 * 2... 25.4 is the conversion factor between inches and mm. Has anyone else ever seen this problem? The NEMA 23 mounting holes should be 1.854" or 47.14mm center to center. That is the only critical dimension. One person helping to print this indicated that there were issues with the base STL file. I don't see that myself, but let me know if you have an idea what is wrong. So far no one has been able to print any of the objects (I don't have a 3d printer... yet). The nozzle jams, the head jerks, or the print area is too small. I've uploaded the STL files to Shapeways to pay for a print, but... you guessed it... they are reporting the object about twice the size it should be. I'm very frustrated at this point, having checked, checked, and re-checked everything I can think of. After more than a month of trying with 3 different printers (and I do very much appreciate the owners of those machines trying to help) I'm starting to panic. This project has a deadline in one month and this is just the first iteration of the winch. PLEASE HELP?
With this file you will be able to print Small Powered Winch with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Small Powered Winch.