Stewart Platform v2.1
thingiverse
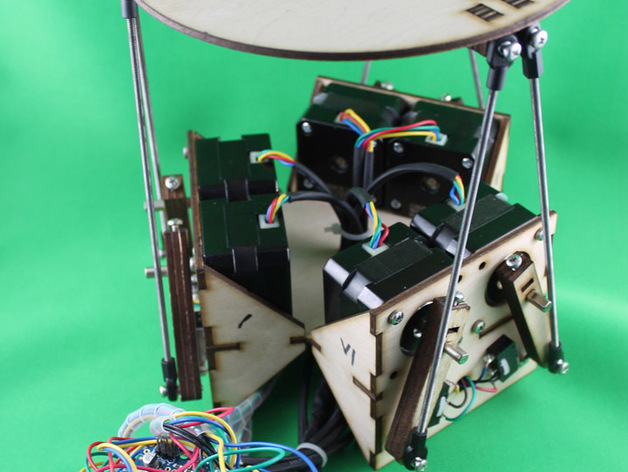
As seen on Hackaday!. Stewart Platforms are the machines under flight simulators. They're also used in robotic surgery. They are normally only seen in universities because students have to build custom machines for their specific applications. I hope that having a free open hardware design will make life easier for engineers everywhere. If you need one and don't want to make it yourself, go to marignallyclever.com This robot is currently missing the java code to make it easy to run. Features: Runs on GCODE 1500g static holding force (worst case, tested to failure) 20 degrees pitch & roll 10 degrees yaw +/-40mm heave, surge, & sway Measures 165mm across the top, 230mm across the base, 190mm high at rest, ~230mm at center position Weighs ~1650g. 150g less and it could carry a copy of itself! +/- 0.125mm repeatability Limit switches & homing (G28) Mounting holes on top plate have been planned for an extra 7th axis (full yaw rotation). Arduino code, Bill of Materials, and assembly instructions on Github 2018-11-02: v2.1 replaced some laser cut parts with 3D printing now that I have a reliable printer. Instructions Arduino code, Bill of Materials, and assembly instructions on Github The cut parts are lasered from 3mm birch ply.
With this file you will be able to print Stewart Platform v2.1 with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Stewart Platform v2.1.