Tarantula Reframed & Reloaded, easier to print Dual Z-belt drive
thingiverse
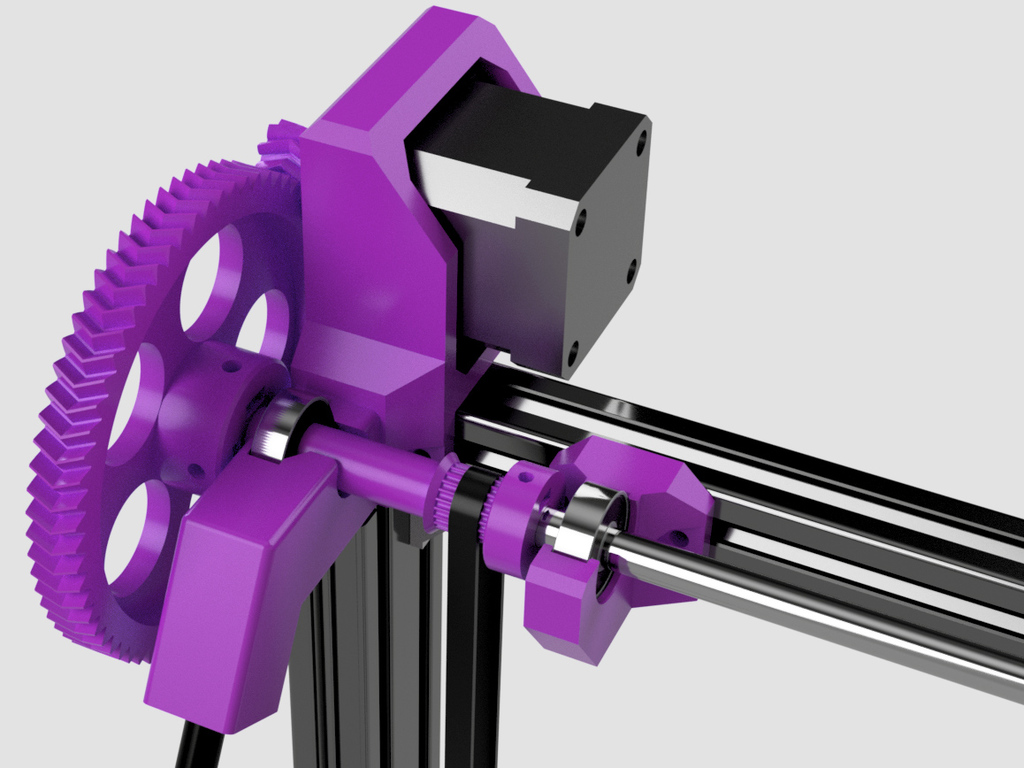
This is a remix of the Z-drive portion of this design: https://www.thingiverse.com/thing:3226089 You will need some parts from the older design. UPDATE 1/14/2020: New 67-tooth gear with 4 set screws to really dial in centering and true everything up. UPDATE 1/9/2020: New gears have higher ratio, so less chance of slowly falling gantry when steppers are off, and better resolution. The parts are oriented for best printing position. Depending on weight of your X gantry, how tight everything is, and holding torque of your motor while powered off, this setup may slowly coast down. If that's a problem: increase pressure of gears against each other, or make some gears with higher ratio. ### Firmware needs Z axis reversed, and Z steps need to be 541 steps/mm (stock lead screw is 1600 steps / mm). Of course set it to 541 and calibrate from there. __How math works out:__ **The gear ratio is 9/67 or about 7.444:1, which turns GT2 pulleys with pitch diameter of 14.01mm.** **Pulley Pitch Circumference: (pi) 14.01mm = 41.01mm** **Distance moved by belt per motor revolution: 44.01mm / 7.444 = 5.912mm** **(1.8 degree stepper: 360 / 1.8 = 200 real steps per rev)** **Z belt distance moved per real step: 5.912mm / 200 = 0.02956mm** **With 16x microstepping: 0.02956 mm / 16 = 0.001848mm** **Microsteps per mm required = 1 / 0.001848 = 541.25** **Rounded: 541**
With this file you will be able to print Tarantula Reframed & Reloaded, easier to print Dual Z-belt drive with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Tarantula Reframed & Reloaded, easier to print Dual Z-belt drive.