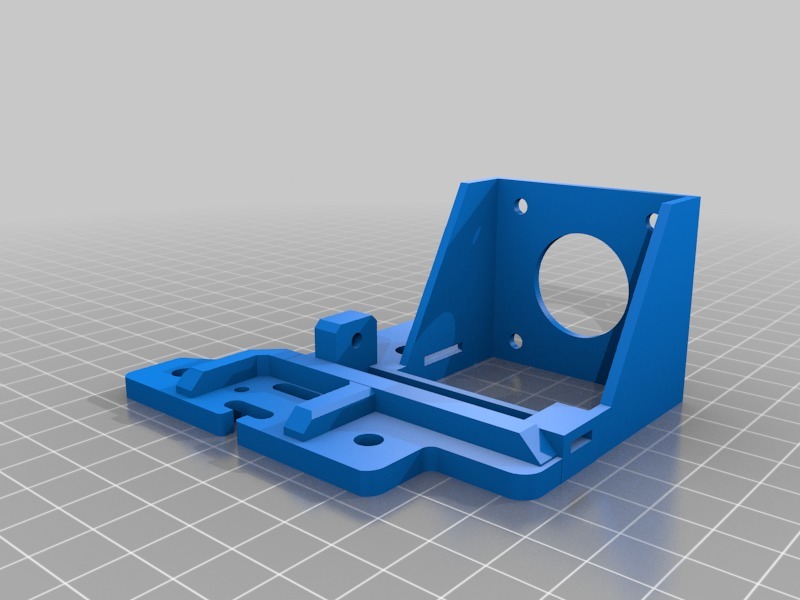
Tevo Tarantula Direct E3D Titan X-Carriage with BLTouch
thingiverse
This is my own remix of Tevo Tarantula Direct E3D Titan X-Carriage made by puma1824. I've mad this because I have an unused NEMA17 motor 28mm 17HS2408, and that motor is cheaper than pancake motors. I have to change dimensions of the tensioner because there is to tight. Thats all folks, have fun ;-) Additional info based on puma1824 description: IMPORTANT: Because the endstop was relocated, you will need to make a few changes in your firmware and hardware. The following changes were done using Marlin 1.1 RC7 & MKS Base 1.2: Uncomment define USE_XMAX_PLUG Changed X_HOME_DIR from -1 to 1 Moved the connector on the MKS board from -X to +X ADDITIONAL: May need this as well. Thanks xfirax for the heads up! define X_MAX_ENDSTOP_INVERTING false // set to true to invert the logic of the endstop X & Y Probe Offset(s): BLTouch: X Probe offset from nozzle: 20mm Y Probe offset from nozzle: 65mm
With this file you will be able to print Tevo Tarantula Direct E3D Titan X-Carriage with BLTouch with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Tevo Tarantula Direct E3D Titan X-Carriage with BLTouch.