Tevo Tarantula Inverted Dual Z Axis
thingiverse
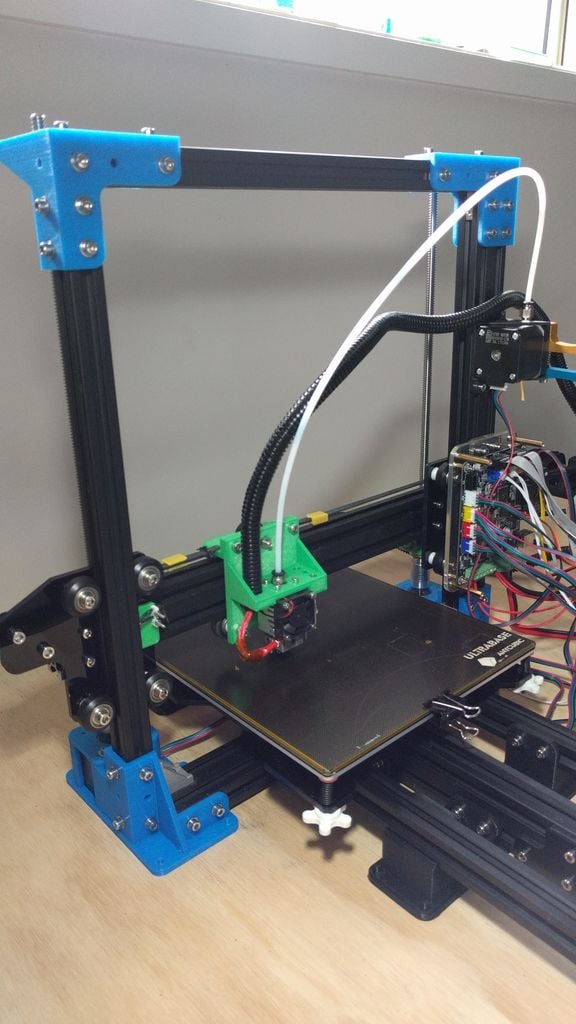
Add a second Z axis for enhanced support by inverting the motors, placing them at the base to boost stability. Concerns about increased vibration during printing from two motors at the top prompted this adjustment. This modified design builds upon "Tevo Tarantula Brackets" by thingirob (https://www.thingiverse.com/thing:1457449). Utilize the center base and Y base from the original, but incorporate my upgrade "TEVO Tarantula Double Y axis rails" (https://www.thingiverse.com/thing:3193014) for additional functionality. The gantry aligns with the rear edge of the horizontal track, unlike the original design's front edge positioning. This simplifies motor placement and enhances overall stability. A few strategically placed holes in the base facilitate 1.75 filament passage, aiding T-nut installation and positioning accuracy. 608 bearings (OD=22mm, ID=8mm) secure lead screws to the top bracket. M4 screws of 10mm length are used but may be too long; 8mm screws would be a better fit. Note: The X-axis's low point is still a concern without the "Tevo Tarantula Vertical X Carriage" (https://www.thingiverse.com/thing:3033881), although my design addresses some of these issues with the "No sanding bearing oldham" upgrade by kisolre (https://www.thingiverse.com/thing:2581521).
With this file you will be able to print Tevo Tarantula Inverted Dual Z Axis with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Tevo Tarantula Inverted Dual Z Axis.