The Mistake (Screwless Klann linkage)
thingiverse
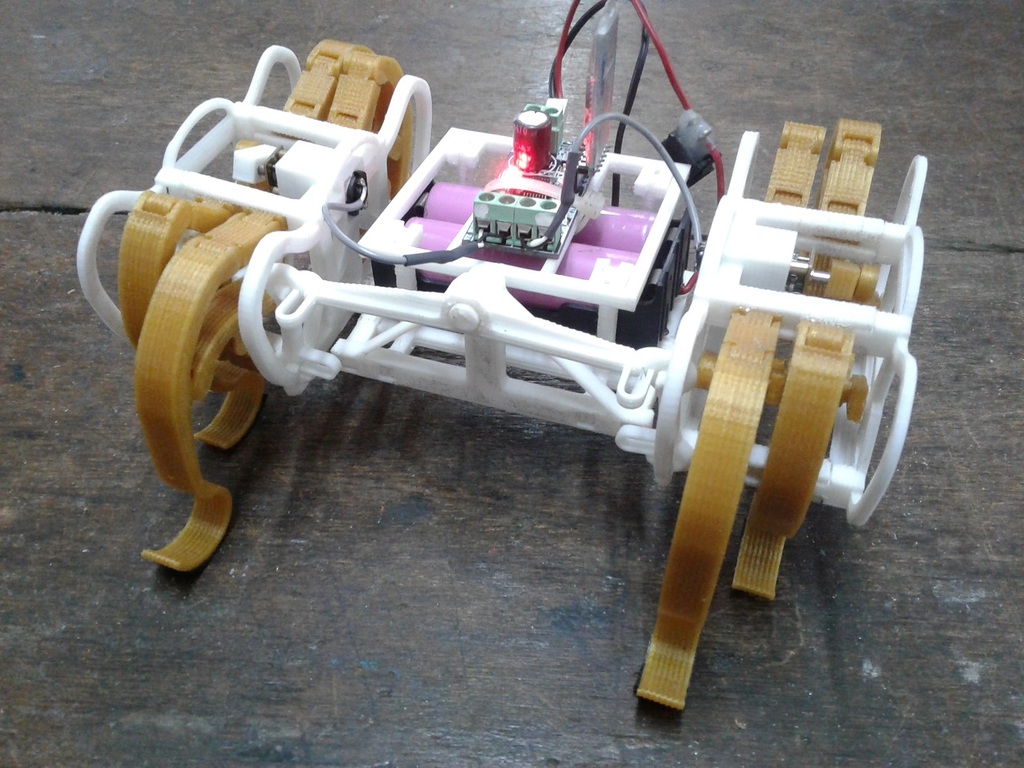
No screws, no printed gears, print-in hinges, what could be wrong? Turned out: many. This is an experiment on making a walking robot with no screws. Gluing might be needed anyway. I think the strength (and weakness) of the connections are influenced by the z-axis wobble of my printer, it created corrugations that add grip (this is how I print for 4 years). Don't know if printed in a perfect printer, maybe everything will come apart if not glued. The walking mechanism is based on the Klann linkage. Each side (4 legs) is mounted on a bogie which is connected to a differential arm so supposedly it can navigate uneven terrain better than a rigid body. The hinges have 0.25mm clearance, it prints fine on my printer, it can move well after initial force-cracking, much exercise, and adding lubricant. The space within the frame is just enough to put a 2x 18650 lithium battery holder. The motor is N20 DC motor with gearbox rated at 6V, 200 rpm. https://www.youtube.com/watch?v=FSGZGtzG4Y4 Parts: linkage x8 frame_outer x2 frame_inner x1 + 1 mirrored frame_mid x1 frame_top x1 frame_front x1 pinholder x2 pin x2 difflink x2 diffbar x1 crank_motor x2 crank_triangle x2 crank1 x4 crank2 x4 crank3 x4 After printing and assembling, I realized that there is a mistake in how the connections are designed... Print this if you want to re-discover it. Otherwise, try the next version if you are interested: https://www.thingiverse.com/thing:4971253
With this file you will be able to print The Mistake (Screwless Klann linkage) with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on The Mistake (Screwless Klann linkage).