uStepper Robot Arm Wrist Joints
thingiverse
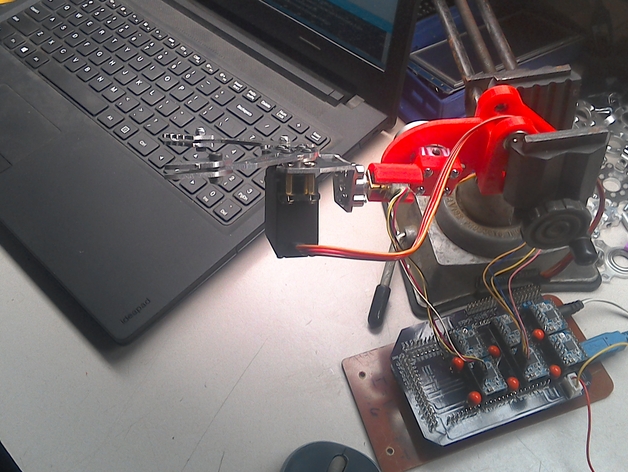
I like the design of the uStepper Robotic Arm so much I have started to build one. Unfortunately for my preference, it has limited wrist movement. I use a 28BYJ-48 12V stepper for the angular wrist movement and a micro geared stepper for the rotational movement.. This is only a prototype for now, basically proof of concept. The only down side is the 28BYJ stepper looses position when the power is removed. I am going to look into using some type of gear reduction for the angular movement and some how reduce the mass of the end-effector This 28BYJ stepper or similar: http://www.ebay.com/itm/28BYJ-48-Valve-Gear-Stepper-Motor-DC-12V-4-Phase-Step-Motor-Reduction-Arduino-/172294403078?hash=item281d8bf406:g:q0kAAOSwdzVXowG~ And this micro geared stepper: http://www.dx.com/p/15mm-2-phase-4-line-micro-15by-dc-5v-stepper-gear-box-motor-355421#.V_CnF-ArK00 The hub adapters are from servocity.com 5mm & 3mm https://www.servocity.com/770-set-screw-hubs Now remember, this is a prototype and/or a work in progress, any suggestions will be considered and appreciated. Print Settings Printer: Dup I3 Rafts: No Supports: No Resolution: .2 mm Infill: 75% Notes: PETG
With this file you will be able to print uStepper Robot Arm Wrist Joints with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on uStepper Robot Arm Wrist Joints.