V-tail Frame for the Hubsan X4 Quadcopter
thingiverse
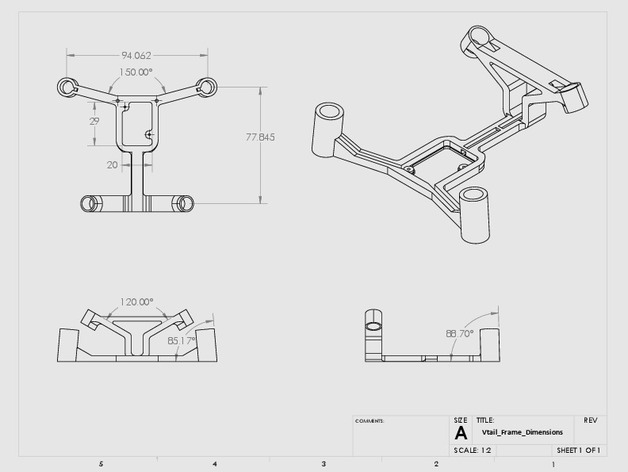
V-Tail quad-copter frame using the Hubsan X4 board. All motors were upgraded to 8.5mm coreless motors. It has a very sharp and responsive Yaw control. Stock props can provide enough lift but only at 80% throttle. Exchanging the back stock props with bigger ones will improve the performance. My current setup is listed below: Front prop: Stock props Back prop: YD717 props Board mounts from the bottom of the frame Back motor wires may need to be extended to reach the board Additional Information: Tilted (dihedral) front motors: 5° to the center Front wing angle: 150° V-tail angle: 120° Print Settings Rafts: No Supports: Yes Infill: 30% Notes: PET+ works the best for it's durability and can survive the most intense crashes. ABS and PLA can work but can't survive that many crashes V-tail legs need to be printed separately and glued to the bottom of the frame. Post-Printing
With this file you will be able to print V-tail Frame for the Hubsan X4 Quadcopter with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on V-tail Frame for the Hubsan X4 Quadcopter.