Wall Climbing Robot Frame
thingiverse
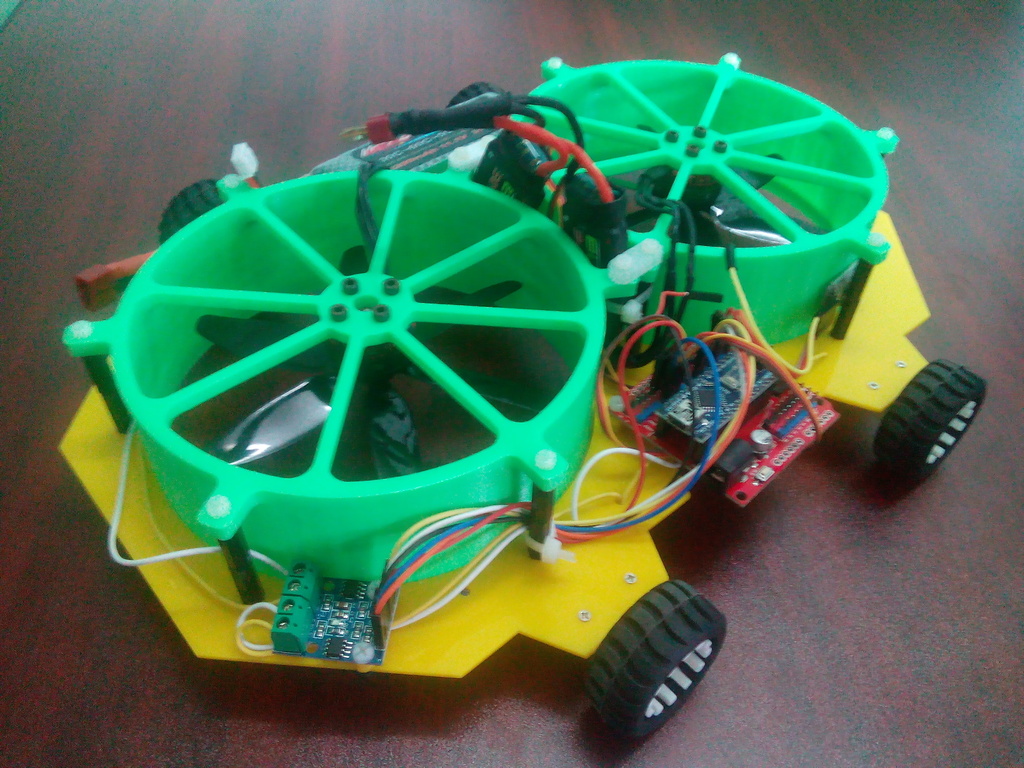
https://youtu.be/3stLtQWl3a4 <p>In my project, there are 6 mains connecting things in my wall climbing robot .Bluetooth module is connected to android mobile phone. Arduino is a microcontroller to control the whole robot process. Funduino nano board is to connect with audrino nano microcontroller. The motor driver is connected with the four DC motor for the locomotion of the robot. The two ESC (Electronic Speed Controller) are connected with the two brushless motors to control the speed of the brushless motors. Lipo battery is long life lipo battery to supply the power for the whole process. For control by android phone, the user must open Bluetooth from user’s phone and connect with the Bluetooth form the Bluetooth Module. After the two connections connect each other the Bluetooth module will send to the main Arduino, Arduino nano will also control the motor driver and the brushless motors. The motor driver will control the four DC motor and ESC will control the two brushless motors.</p> <h3>Components</h3> <p>The following components need to build the Wall climbing Robot.</p> <ul> <li>2 x brushless motor</li> <li>2 x ESC (Electronic Speed Controller)</li> <li>2 x brushless motor mount</li> <li>2 x propeller of the brushless motor (5x4x6R)</li> <li>2 x nut for attaching the propeller on brushless motor</li> <li>4 x N20 DC gear motor</li> <li>4 x rubber wheel</li> <li>4 x N20 Motor Bracket</li> <li>1 x HG7881 2channel motor driver board</li> <li>1 x Bluetooth module</li> <li>1 x Arduino Nano Microcontroller</li> <li>1 x Funduino Nano v3 board</li> <li>1 x Lipo battery (3cells, 11.1V)</li> <li>2 x 3D printed brushless holder prototype</li> <li>1 x robot frame chassis acrylic plate</li> <li>1 x USB cable of Arduino Nano</li> <li>Some Jumper wires</li> </ul> <h3>Principle of Wall Climbing Robot</h3> <p>This method involves installing the two brushless motors on the robot chassis. The movement of the robot is achieved through the use of the rotation of the two brushless motors while the thrust directly acts onto the wall. Hence, this method is using the thrust of the brushless motors.</p> <p>In this project, I have developed a wall climbing robot using the thrust of the brushless motors principle whereas the four DC gear motors are used. The robot platform uses two brushless motors attached on the 3D printing prototype motor holders, and these brushless motors are activated by the using of the ESC (Electronic Speed Controller). The one of the brushless motor is clock wise brushless motor. And the other one is counter clock wise brushless motor. The four DC gear motors are used to move the wall climbing robot as vertical position on the wall. This work also presents the kinematics and the stability analysis of the developed robot mechanism. Experiments have been conducted to analyze the payload capacity and safety factor for the developed robot. In this robot, the brushless DC motor is used because it can give the needed force to push to the wall. Brushless DC motors are steadily replacing brushed DC motors in many applications. The brushless DC motors can be found in computer hard drives, remote controlled airplanes, power tools and many other devices in the fields of industrial control, automotive, aviation, automation systems, health care equipments, etc. In the action of the brushless motor, the direction of the air flow is opposite to the direction of the thrust. Thrust is a force or a push. So, the direction of the thrust placed towards the wall and then this can generate forward thrust to the wall.</p> <p>The attaching principle of the counter clock wise and clock wise brushless motors greatly improves the robot worked with the stability of the robot frame. This principle allows for increased payload and stability. And the air flow of the brushless motor is reverse on the wall. One common weakness with this principle is the difficulty in adhesion. The brushless DC motors are little complex but the benefits are outstanding. The thrust of the brushless DC motors is more than that of other kinds of DC motors. Hence, the brushless motor strong thrust is used in this project.</p> <h3>About Phoewa Science</h3> <p>Phoewa Science offers providing informations that facilitate the creativity in Myanmar(Burma).</p> Website: <a href="http://phoewa.science" title="phoewa.science">Phoewa Science Web</a> Facebook: <a href="http://facebook.com/phoewa.science" title="phoewa.science">Phoewa Science Facebook Page</a>
With this file you will be able to print Wall Climbing Robot Frame with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Wall Climbing Robot Frame.